- 1) программы записи данных (TerraTerm);
- 2) программы анализа данных (разработана в пакете математических программ MatLAB).
- 1) Измерения без утяжеления подвижной измерительной платформы
- 2) Измерения с утяжелением подвижной измерительной платформы без установки направляющих
- 3) Измерения с утяжелением подвижной измерительной платформы
АППАРАТНАЯ И ПРОГРАММНАЯ РЕАЛИЗАЦИЯ УСТРОЙСТВА ДЛЯ ОЦЕНКИ КАЧЕСТВА ЛЬДА НА СПОРТИВНЫХ АРЕНАХ
Назад в рубрикуМ.В. ДАВЫДОВ1, А.Н. ОСИПОВ1, В.Е. ВАСЮК2, Н.Т. МИНЧЕНЯ2
1Белорусский государственный университет информатики и радиоэлектроники П. Бровки, 6, 220013, Минск, Беларусь
2Белорусский национальный технический университет, Независимости, 65, 220013, Минск, Беларусь.
В статье описана конструкция и архитектура чувствительных элементов электрической части макетного образца устройства для оценки качества льда. Определены основные контролируемые параметры, разработана методика контроля коэффициента трения скольжения. В соответствии с разработанной программой проведены испытания макетного образца устройства для оценки качества льда и определены параметры скользкости льда на базе многопрофильного культурно-спортивного комплекса «Минск-Арена»
Ключевые слова: трение, методы регистрации параметров движения, архитектура чувствительных элементов, испытания.
Введение
В современном спорте сложилась ситуация, при которой достижение высоких результатов невозможно без использования новейших спортивных технологий. Непрерывно совершенствуется оборудование для проведения соревнований и учебно-тренировочного процесса, спортивный инвентарь, методики и технологии подготовки спортсмена [1, 8].
С 80-х годов прошлого века соревнования по конькобежному спорту начали проводить в закрытых помещениях, что позволило повысить популярность этого вида спорта за счет привлечения большего числа зрителей. Повышению зрелищности способствовало значительное улучшение соревновательных результатов спортсменов, поскольку появилась возможность обеспечивать оптимальные условия скольжения путем создания искусственной структуры льда, а также создания с помощью современных инженерных средств оптимальных для организма спортсменов тепло-влажностных параметров воздушной среды.
В связи с вышеперечисленным возникла необходимость в создании новых технологий повышения скоростных свойств льда.
Исходные данные для разработки проектируемого устройства
Из анализа патентных и литературных источников в рассматриваемом направлении было выявлено, что кроме общих сведений о результатах измерения параметров движения платформы по ледовой поверхности, фотографий внешнего вида и упрощенных схем конструкций информация о методах измерения параметров скольжения платформы отсутствует [1–7].
Исходными данными для анализа методов измерения коэффициента трения были значения силы трения и значения отрицательного ускорения движущейся по ледовой поверхности платформы. Распределение сил воздействующих на платформу можно представить в виде рисунка 1.
Так как на платформу оказывает воздействие только сила трения (сопротивлением воздуха можно пренебречь) верно равенство:
— Fпл = Fтр
где Fпл – сила воздействующая на платформу, Fтр – сила трения.
По значению отрицательного ускорения вычисляется коэффициент трения ледовой поверхности. Исходя из того, что
Fтр = k*N = k*m*g,
где k – коэффициент трения скольжения, N – сила реакции опоры, m – масса платформы,g – ускорение свободного падения,
Fпл = m*a
можно записать:
k = -a/g.
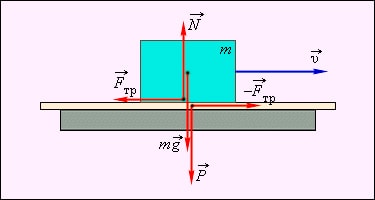
Рисунок 1 – Распределение сил, воздействующих на платформу при скольжении по ледовой повехности
Таким образом, для нахождения коэффициента трения скольжения необходимо с достаточной точностью измерить отрицательное ускорение платформы при движении ее по ледовой поверхности [8].
Выбор метода регистрации параметров движения измерительной платформы
В [1–7] источниках указывается, что значения коэффициента трения скольжения достаточно мало ~ 10-3 таким образом для прямого измерения отрицательного ускорения, возникающего под воздействием силы трения необходимо использовать методы акселерометрии высокой степени точности (разрешение датчика на уровне 10-4 м/c2). В настоящее время цифровые акселерометры не обладают достаточной разрешающей способностью. К требуемым параметрам приближаются аналоговые датчики (например ADXL103 компании Analog Devices) однако время усреднения аналогового сигнала для заданной точности приближается к 10 секундам, что дает всего несколько точек на весь период измерений.
Исходя из вышеизложенного, было принято решение использовать методы лазерной дальнометрии для измерения параметров передвижения платформы. При известном расстоянии и времени измерения есть возможность найти скорость и отрицательное ускорение платформы
V = (S2 – S1)/( t2 – t1)
где V – скорость на отрезке, S2 и S1 – расстояние в при измерении в периоды времени t2 и t1.
а = (V2 – V1)/( t2 – t1)
где V2 и V1 – скорость при измерении в периоды времени t2 и t1.
Исходя из вышеперечисленных выкладок, можно сделать вывод, что измерение параметров перемещения платформы может дать информацию о требуемых свойствах ледовой поверхности.
Разработка архитектуры чувствительных элементов для измерения параметров качества льда
На основании этого сформирована следующая архитектура чувствительных элементов для измерения параметров качества льда (рис. 2)
В качестве датчиков были выбраны лазерные дальномеры компании SICK DME4000 и DL50HI. Датчик DME4000 обладает высокой точностью измерений (разрешение ). Внешний вид и основные характеристики датчиков приведены в таблице 1.
Исходя из того, что основные требуемые параметры датчиков сопоставимы, а стоимость датчика DL50HI по сравнению со стоимостью датчика DME4000 меньше в 4 раза, принято решение использовать датчик DL50HI.
В общем виде электрическая часть макета состоит из следующих частей: 1) система питания на базе аккумулятора 12В с зарядным устройством, датчика лазерного дальномера DL50HI, интерфейсной платы, включающей преобразователь интерфейса RS485–UART и модуль Bluetooth интерфейса, платы блока управления на базе модуля Arduino и персонального компьютера с требуемым программным обеспечением.
Аккумулятор с напряжением 12В и емкостью 7.5 А/ч позволит обеспечить беспрерывную работу 20 часов без подзарядки.
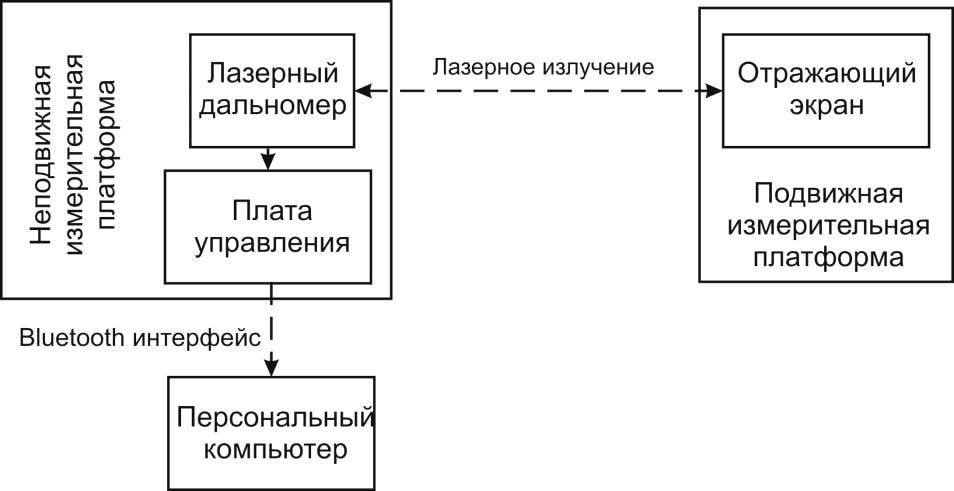
Рисунок 2 – Архитектура чувствительных элементов для измерения параметров качества льда
Таблица 1 –Основные характеристики датчика SICK DL50HI
| Параметр | Значение |
| Дальность измерений | 0,2 – 50 м |
| Скорость измерений | до 400 изм/с. |
| Точность измерения | ±3мм |
| Напряжение питания | 10 – 30В |
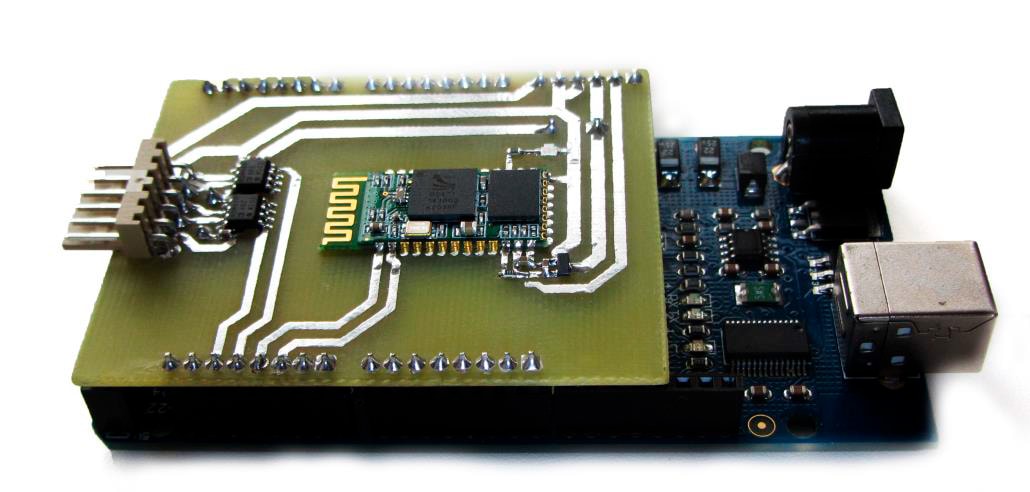
Рисунок 3 – Плата управления и интерфейсная плата. 1 – преобразователь интерфейса RS485–UART, 2 – модуль Bluetooth интерфейса, 3 – плата блока управления на базе модуля Arduino
Датчик DL50HI подключается к интерфейсной плате и по протоколу RS485 непрерывно передает данные о дальности до объекта в виде последовательности ASCII символов со следующим форматом 0203±ххххххх, где 0302± – код начала строки с данными, ххххххх – последующие 7 текстовых символов со значением расстояния. Для получения дистанции в метрах полученное значение необходимо перевести в цифровой вид и разделить на 105.
Данные с датчика посредством интерфейсной платы преобразуются в уровни TTL и считываются посредством порта UART платой управления на базе микроконтроллера Atmel ATmega1280.
Программное обеспечение электрической части макетного образца устройства для оценки качества льда
Программное обеспечение микроконтроллера работает по следующему алгоритму (рис 4).
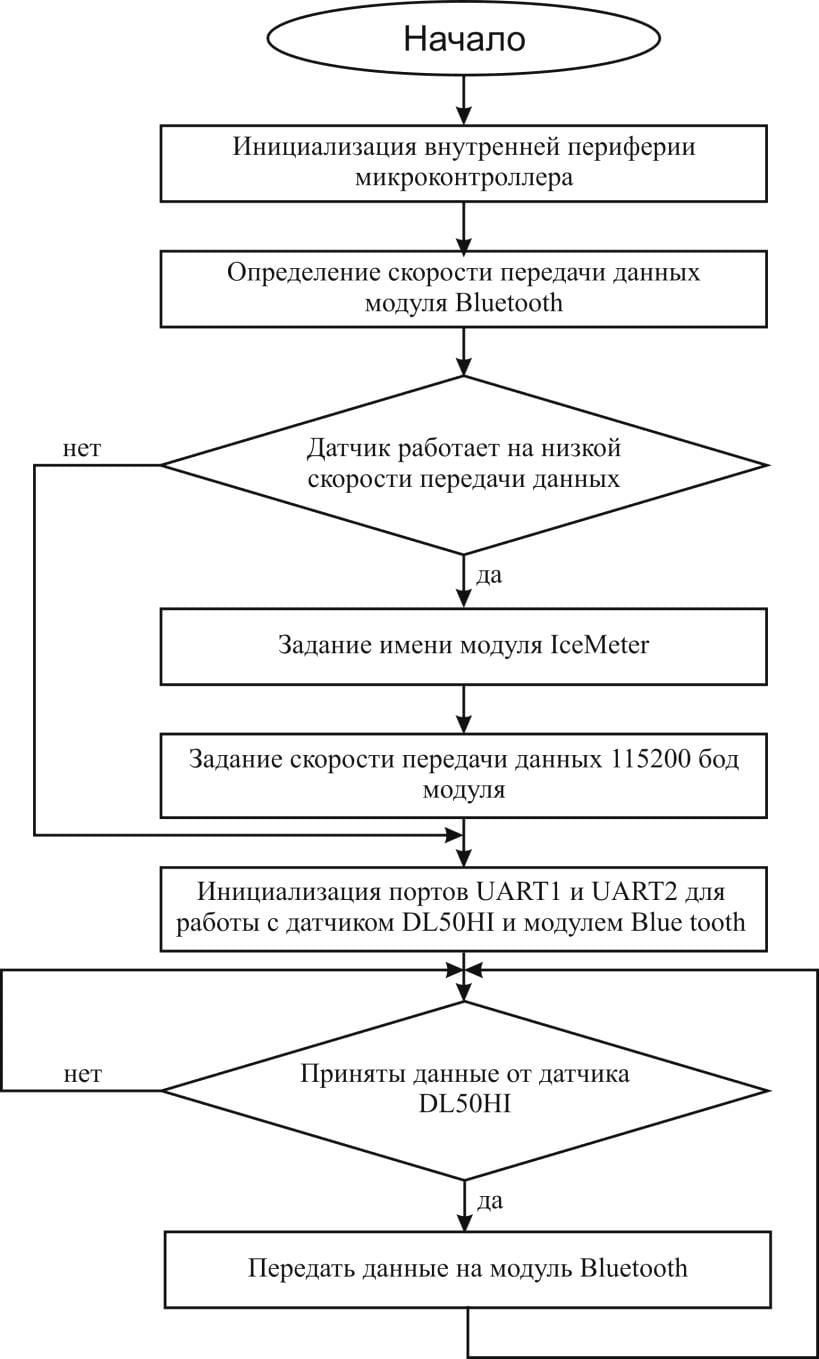
Рисунок 4 – Алгоритм программного обеспечения микроконтроллерного блока управления.
На начальном этапе происходи инициализация внутренней периферии микроконтроллера ATmega1280. Далее выполняется согласование скоростей передачи данных микроконтроллера и модуля Bluetooth. Если модуль Bluetooth настроен на низкую скорость передачи данных (по умолчанию на этапе производства модуль настраивается на скорость 9600 бод) микроконтроллер перенастраивает модуль, задавая его имя и скорость передачи данных равную 115200 бод. После этого микроконтроллер настраивает два порта UART для приема данных с датчика и передачи их на персональный компьютер.
На персональном компьютере работает комплект программного обеспечения, состоящего из двух программ:
Программа TerraTerm позволяет сохранить данные, получаемые по Bluetooth интерфейсу в текстовый файл.
Программное обеспечение, разработанное в пакете математических программ MatLAB позволяет считать данные из текстовых файлов, выполнить построение графиков передвижения платформы, в интерактивном режиме выделить участок графика для расчета параметров скорости, ускорения, и коэффициента трения скольжения. Данные выводятся в виде графиков и могут быть сохранены для формирования отчета об эксперименте.
Результаты исследования стабильности силового импульса
Исследования проводились на базе многопрофильного культурно-спортивного комплекса «Минск-Арена». Производилась регистрация отстрела подвижной платформы измерительного комплекса с последующей регистрацией параметров ее передвижения по ледовой поверхности.
Было проведено 3 серии измерений:
Результаты измерений №1 (без утяжеления платформы) представлены в таблице 2
Таблица 2 – Результаты измерений без утяжеления платформы
| Дистанция (м) | Параметр передвижения платформы | ||
| Скорость (м/с) | Ускорение (м/с2) | Коэффициент трения скольжения (ед.) | |
| 0 | 1,5 | – | |
| 2 | 1,45 | -0,037 | 0,0038 |
| 4 | 1,37 | -0,056 | 0,0058 |
| 6 | 1,27 | -0,066 | 0,0067 |
| 8 | 1,17 | -0,061 | 0,0062 |
| 10 | 1,05 | -0,067 | 0,0068 |
| 12 | 0,9 | -0,073 | 0,0075 |
| 14 | 0,75 | -0,062 | 0,0063 |
| 16 | 0,58 | -0,057 | 0,0058 |
| 18 | 0,29 | -0,063 | 0,0064 |
Установлено, что скорость в начальный момент времени равна 1,5 м/с; участок, но котором проводились измерения равен 18 метров, на данной дистанции скорость снизилась до 0,29 м/с. Ускорение в среднем на участке измерения составило -0,06± 0,007 м/с2, Коэффициент трения скольжения в среднем 0,006±0,0005 (рис. 5, 6).
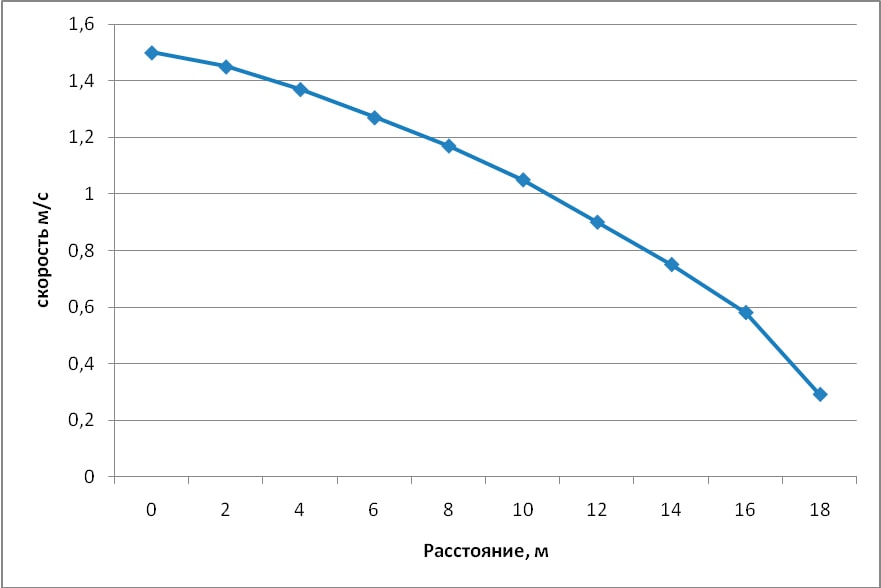
Рисунок 5 – График изменения скорости скользиметра
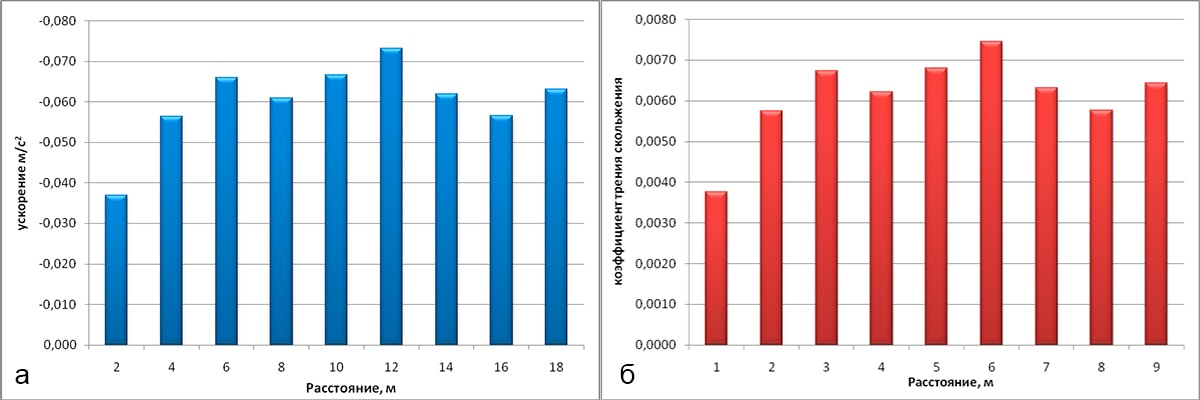
Рисунок 6 – График отрицательного ускорения (а) и коэффициента трения скольжения (б)
При измерении параметров движения платформы с утяжелением, установлено, что скорость в начальный момент времени равна 1,5 м/с; участок, но котором проводились измерения равен 20 метров, на данной дистанции скорость снизилась до 0,45 м/с. Ускорение в среднем на участке измерения составило -0,051± 0,006 м/с2, Коэффициент трения скольжения в среднем 0,005±0,0004.
Заключение
В результате анализа патентных и литературных источников определена оптимальная конструкция и архитектура чувствительных элементов электрической части макетного образца устройства для оценки качества льда. Определены основные контролируемые параметры, разработана методика контроля коэффициента трения скольжения.
2 Изготовлена электрическая часть макетного образца устройства для оценки качества льда. Разработана программа испытаний механической части макетного образца устройства для оценки качества льда.
3 В соответствии с разработанной программой проведены испытания электрической части макетного образца устройства для оценки качества льда. Ускорение в среднем на участке измерения составило -0,06± 0,007 м/с2, коэффициент трения скольжения в среднем 0,006±0,0005 (при измерениях без утяжеления платформы) и -0,051± 0,006 м/с2 и 0,005±0,0004 соответственно при измерениях с нагруженной платформой.
HARDWARE AND SOFTWARE OF THE DEVICE FOR EVALUATING THE QUALITY OF ICE IN THE SPORTS ARENA
DAVYDOV M.V., OSIPOV A.N., V.E. VASJUK, N.T. MIVCHENJA
The article describes the design and architecture of the sensitive elements of the prototype of an electric device to assess the quality of the ice. The main controlled parameters, the technique of controlling the coefficient of friction have been described. The prototype of the device for evaluating the quality of the ice has been tested on the basis of a cultural and sports complex «Minsk-Arena»
Литература
Гончарова, Г.Ю. Новый этап развития ледовых технологий / Г.Ю. Гончарова [и др.] // Холодильная техника. – М., 2009. – № 5. – С. 2–13.
2. Шавлов, А.В. «Сверхзкользкий» лед для конькобежного спорта / А.В. Шавлов, А.А. Рябцева, В.А. Шавлова // Криосфера Земли, 2007. – Т. XI, № 2. – С. 49–59.
3. Спортивный комплекс «Крылатское» [Электронный ресурс] / Главная / КП «Спортивный комплекс «Крылатское»» / Цифры и факты / Подготовка льда. – Режим доступа: http: // www.skating-palace.ru / about / fakt / ice. – Дата доступа: 25.02.2012.
4. Kuroiwa, D. The kinetic friction on snow and ice / D. Kuroiwa // Journal of Glaciology. – Vol. 19, N 81. – 1977. – P. 141–152.
5. Гончарова, Г.Ю. Тайны ледового дворца или Хроники первых побед на льду «Крылатского» / Г.Ю. Гончарова, С.И. Нефедкин // Холодильная техника. – М., 2005. – № 6. – С. 6–15.
6. Физические основы создания льда с заданными свойствами для конькобежцев [Электронный ресурс] / Зависимость скользящих свойств льда от времени заливки. – Режим доступа: http: // www.ice4sport.com /puplikciin / article post. – Дата доступа: 21.04.02.2014.
7. Ледовые нанотехнологии [Электронный ресурс] / Строительство & эксплуатация, 2007. – № 10. – Режим доступа: http: // www.ice4sport.com /puplikciin /article post. – Дата доступа: 21.04.02.2014.
8. Кухлинг, X. Справочник по физике / X. Кухлинг; пер. с нем., 2-е изд. – М.: Мир, 1985. – 520 с.