- 1. создание 3D модели в среде SolidWorks на базе эскизной модели прыгающего робота SALTO-1P.
- 2. изготовление, сборка и настройка подвижных и неподвижных частей робота, включающих в себя различные тяги, корпус, подшипниковые узлы, систему нелинейной передачи механической энергии от привода к подвижной части (далее — пружина).
- 3. проектирование и сборка электрического привода, включающего в себя мотор, редуктор и систему управления.
РАЗРАБОТКА И СОЗДАНИЕ ПРОТОТИПА МОБИЛЬНОГО РОБОТА С ПРЫЖКОВЫМИ ЛОКОМОЦИЯМИ
Назад в рубрику 
Прокопович Г.А.1, Ходаронок А.В. 1, Будков В.Ю. 2
1Объединённый институт проблем информатики НАН Беларуси,
2Санкт-Петербургский институт информатики и автоматизации РАН
Введение
Несмотря на то, что транспортные устройства на колёсном шасси уже давно заняли свои лидирующие позиции на производстве и в народном хозяйстве, в экспериментальной робототехнике не прекращаются попытки достичь уровня биологических аналогов, которые способны бегать, летать и плавать с недостижимой для сегодняшней техники эффективностью [1-2]. В связи с этим, в борьбе за повышение энергоэффективности с каждым годом появляется все больше роботов, движущихся нетрадиционными методами и использующих нестандартные движители. У колесных платформ и шагающих роботов есть ряд недостатков, связанных с энергоэффективностью и преодолением пересечённой местности. Среди роботов с нестандартными способами передвижения особенно выделяются прыгающие, использующие ногу или ноги в качестве модуля, посредством которого осуществляется отрыв от поверхности. Благодаря прыжкам происходят переходы кинетической энергии “летящего” тела в потенциальную энергию пружинного устройства и обратно. Таким образом, подобные роботы могут обладать значительно большей энергоэффективностью и проходимостью чем их конкуренты на базе колесных шасси.
Анализ открытых информационных источников показал, что среди известных прыгающих роботов, с точки зрения практического использования, наиболее эффективной и перспективной является модель Salto-1P, которая была разработана специалистами из Biomimetic Millisystems Lab Калифорнийского университета в Беркли [1-2]. Принцип работы прыжкового механизма робота Salto был разработан по аналогии с небольшими животными Галаго, которые несмотря на свой миниатюрный размер и небольшую мышечную массу, способны реализовывать дальние прыжки. Тем не менее, несмотря на открытость и достаточно большое количество источников, посвященных указанному работу, некоторые ключевые принципы и конструктивные особенности работы его прыжкового механизма так и не были полностью раскрыты.
Для широкого изучения заложенных в указанный механизм бионических принципов работы в пакете MATLAB/Simulink была разработана его имитационная модель. Полученные модельные данные позволили не только подтвердить и уточнить начальные предположения, но и определить ряд ключевых зависимостей функционирования механизма. Однако, для валидации полученных результатов потребовалось создание физической модели прыгающего робота.
Таким образом, целью данной работы было доказательство работоспособности разработанной ранее электронной имитационной модели прыгающего робота Salto-1P и поиск рациональных путей его улучшения. Для проверки основных принципов реализации прыжка с использованием системы накопления энергии было необходимо решить комплекс задач: разработать и создать прототип робота, оснащенного прыжковым механизмом, электродвигателем, редуктором, пружиной и системой управления, а также выполнить ряд физических экспериментов по измерению количественных характеристик прыжка.
Создание физического прототипа
Процесс прототипирования прыгающего робота состоял из трех последовательных этапов:
На первом этапе, на основе известной кинематической схемы робота Salto была предпринята попытка создать в программе SolidWorks его твердотельную модель. Благодаря наглядности выбранного метода, в соответствии с кинематической схемой были определены необходимые длины и точки крепления тяг, чтобы в сложенном и разложенном положениях их углы наклона были выдержаны в нужных пределах. После определённого процесса перебора значений указанных параметров, была достигнута правильность работы всей кинематической схемы. В результате процесс складывания-раскладывания происходил плавно и без значительных трений в узлах механизма.
Следующим этапом было создание первого варианта физического прототипа, большинство деталей которого была напечатана на 3D принтере из полилактида (PLA) [2]. Также, в наиболее ответственных и тонких частях робота, где торсионные деформации неприемлемы, были использованы углеволоконные трубки и стержни различных диаметров. С помощью них же реализованы все оси вращения и валы для облегчения конструкции (рисунок 1).

Рисунок 1. Внешний вид первого прототипа прыгающего робота Salto.
В первом прототипе прыжковый механизм приводился в движение с помощью микро мотор-редуктора фирмы Pololu 250:1 LP 6V со следующими показателями: 6V, 54RPM, 0,23W Для размещения двигателя в центре корпуса робота была разработана и напечатана на 3Д принтере дополнительная зубчатая передача с передаточным соотношением 1:1. Первое зубчатое колесо было жестко соединено с мотор-редуктором, а второе таким же образом соединялось с вращающейся осью самого механизма робота. Управление мотор-редуктором было реализовано с помощью системы управления на базе платы Arduino с дополнительным мотор-шилдом для управления коллекторным двигателем (рисунок 1).
Испытания первого прототипа доказали правильность кинематической схемы и работоспособность механизма в целом. В дальнейшем его конфигурация не менялась. Однако, в процессе испытаний был сделан вывод, что выбранный коллекторный мотор-редуктор недостаточно подходит к данному роботу в связи с низкой мощностью. Прыжковый механизм в процессе разгона выпрямлялся и выходил на свою амплитуду, однако отрыва от поверхности не происходило. В процессе разгона робот не смог набрать нужной скорости из-за недостаточного момента на выходном валу выбранного мотор-редуктора, а также потери мощности на трение. В связи с этим, было принято решение разрабатывать новый двухступенчатый редуктор, который будет приводиться в движение бесколлекторным электродвигателем, работающим от напряжения 12В и имеющим характеристику в 1700 оборотов на вольт.
Кинематическая схема разработанного редуктора представлена на рисунке 2. С целью уменьшения износа вторая и четвертая шестерни редуктора были изготовлены из нейлона, третья шестерня — из PLA, шестерня двигателя — из латуни. Также для уменьшения трения при его работе и увеличения надежности редуктора в редукторе были использованы подшипниковые узлы.
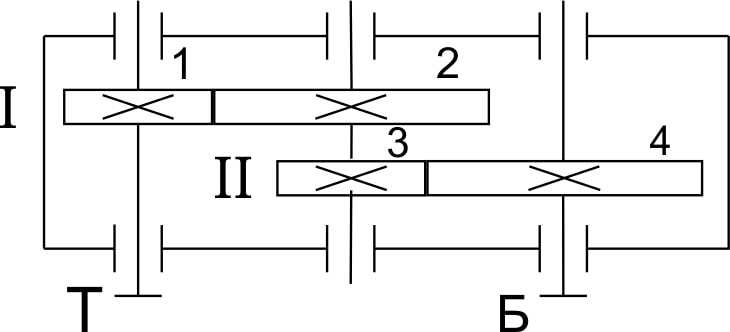
Рисунок 2. Кинематическая схема редуктора.
Редуктор разрабатывался таким образом, чтобы в его состав входил модуль подпружинивания, выполняющий важную роль рекуперации энергии, которая используется для увеличения скорости разгона в начальной фазе прыжка (рисунок 3). Выходная шестерня редуктора имеет 6 отверстий (1) для закрепления пружины, выполненной из кордовой резины. Поворотный кулак (3) механизма был также подвергнут изменениям и теперь имеет планшайбу (2) также с шестью отверстиями для закрепления пружины.
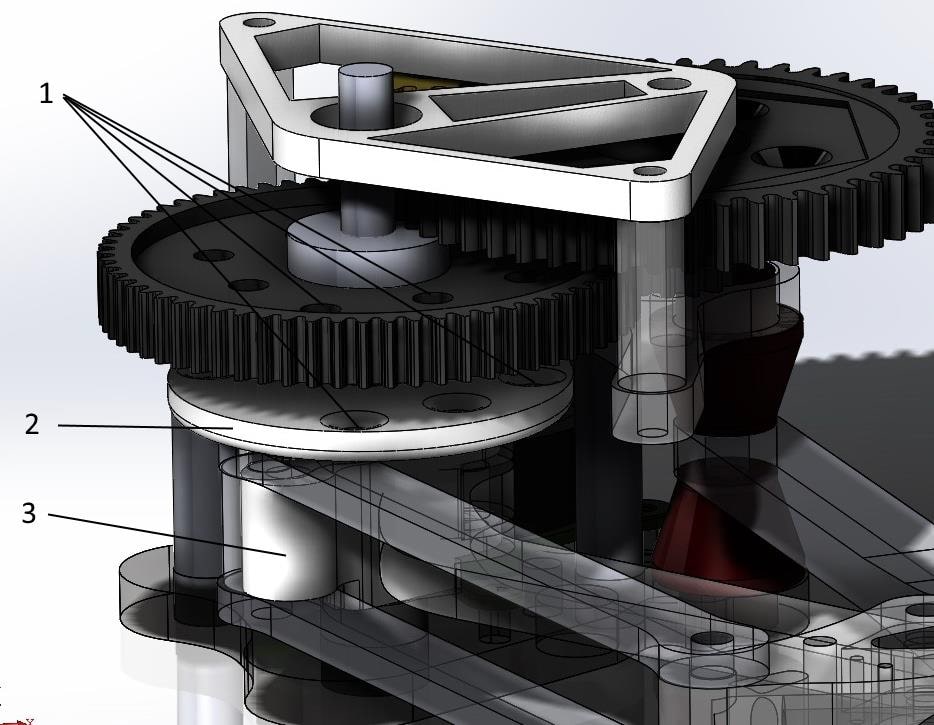
Рисунок 3. Крепления для пружины на 3D модели.
После моделирования твердотельной модели редуктора в среде SolidWorks, следующим этапом было изготовление и установка нового редуктора на робота (рисунок 4).

Рисунок 4. Редуктор с бесколлекторным мотором для второй версии прототипа.
Данный редуктор имеет передаточное соотношение 1:18. Оно определяется по формуле:
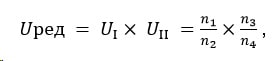
где UI и UII – передаточные числа I и II ступеней редуктора;
n – число зубьев в зубчатых колесах редуктора.
Таким образом получаем передаточное число двухступенчатого цилиндрического редуктора:
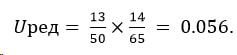
Нового редуктора с таким передаточным числом оказалось достаточно для приведения в движение всего механизма под нагрузкой [3].
Следующим этапом были эксперименты с пружиной. Именно пружина позволяет механизму “выстреливать”, а не линейно разжиматься. Этот процесс продемонстрирован на следующем графике (рисунок 5). После того, как мотор начал работать (1), пружина начинает растягиваться и накапливать энергию. Мотор продолжает работать на растяжение пружины до тех пор, пока крутящий момент, накопленного пружиной не станет достаточно для преодоления сопротивления, создаваемого массой самого робота через динамический рычаг механизма в сложенном состоянии. В момент, когда происходит перегиб линии мощности пружины в положительную сторону (2), начинается фаза отталкивания робота от земли. Это связано с тем, что выходной вал редуктора через растянутую пружину начинает воздействовать на механизм подъёма и его нога начинает разгибаться. Кинематика прыгающего робота спроектирована таким образом, что в системе опоры-пружина-редуктор-опоры образуется «мягкий» кулачковый механизм, который в процессе выпрямления ноги создаёт динамический рычаг. Благодаря этому, начиная с момента, указанного на графике в точке (3), на подъём механизма начинает работать не только двигатель, но и накопленная в пружине энергия. Когда мощность, выдаваемая пружиной через динамический рычаг, становиться больше мощности, выдаваемой выходным валом редуктора, мотор блокируется, чтобы пружина передала оставшуюся энергию в ускорение робота, а не вернула её обратно к мотору через редуктор. На графике наглядно видно, что блокировка двигателя начинается с момента пересечения кривых (4). После этого дальнейшее выпрямление ноги происходит только за счёт энергии заряженной пружины. Механизм рассчитан таким образом, что отрыв робота от земли происходит после практически полной отдачи пружиной накопленной энергии (5).
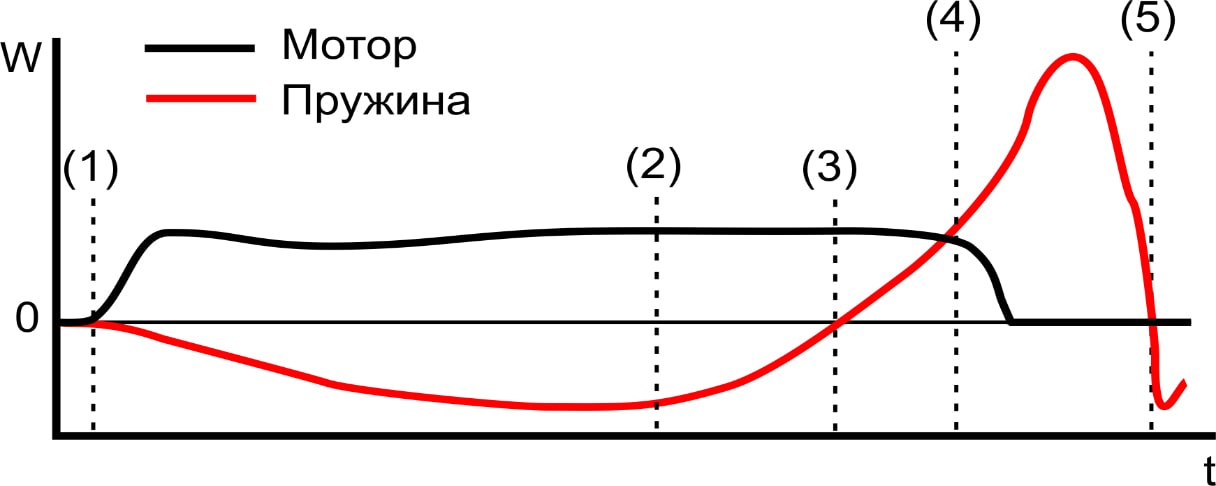
Рисунок 5. График зависимости усилий, прикладываемых к мотору и пружине
Реализована пружина с помощью пучков кордовой резины. вставленных в соответствующие отверстия выходной шестерни редуктора и планшайбы (рисунок 6). С помощью подбора количества пучков кордовой резины требовалось подобрать такую жесткость пружины, чтобы энергия от редуктора сначала заставила пружину закрутиться на 180 градусов, а затем в фазе разгона резко передать накопленную энергию на поворотный кулак механизма.

Рисунок 6. Пружина из кордовой резины.
Ряд экспериментов были направлен на то, чтобы выяснить оптимальную жесткость пружины для максимально возможной высоты прыжка при текущей конфигурации робота (рисунок 7). Также в ходе испытаний была определена прямая зависимость высоты прыжка от состояния пружины. За счет усталости пружины результаты оказывались всегда разными. Максимальная высота прыжка составила около 45 см. Эта высота была достигнута при первом запуске после установки пружины, соответственно, усталость пружины была минимальна. Пружина при этом состояла из четырех пучков кордовой резины. Дальнейшие испытания показали меньшую высоту прыжка в связи с усталостью пружины.
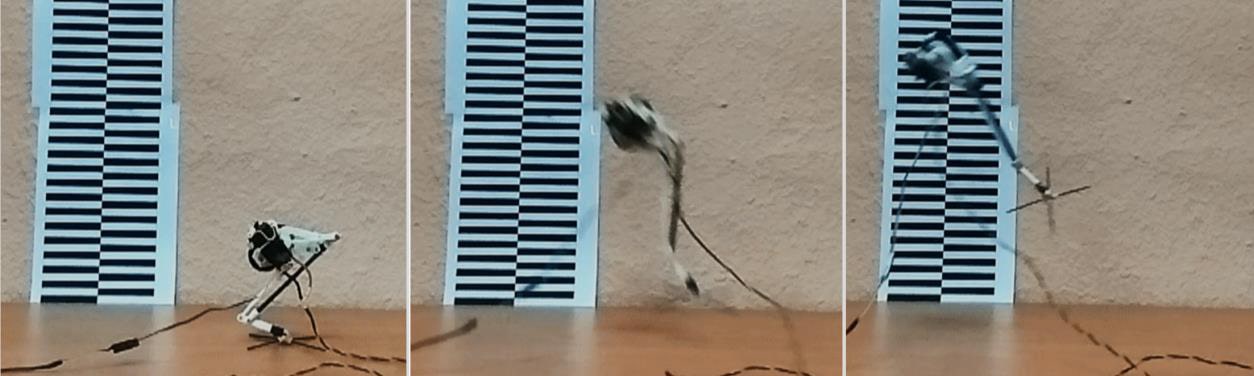
Рисунок 7. Испытания робота.
Для реализации указанных экспериментов управление бесколлекторным электродвигателем было реализовано с помощью авиамодельного регулятора оборотов EMAX SimonK, поддерживающего ток до 20А и напряжение 12В. Управляющий сигнал ШИМ подавался на указанный регулятор оборотов через приемник радиосигнала FlySky X6B, работающий на частоте 2,4ГГц (рисунок 8). Блоки, которые находятся непосредственно на роботе объединены пунктирной рамкой. Источник питания в перспективе также должен быть установлен на роботе в виде Li-Po аккумулятора.

Рисунок 8. Блок-схема системы управления.
Для проведения дальнейших исследований, а также модификаций и реального использования мобильных роботов с использование прыжковых локомоций планируется разработать специализированную плату системы управления, которая по внешнему сигналу будет контролировать процесс прыжка строго по заданной циклограмме. Как и в описываемом случае, временные значения циклограммы будут определятся с помощью компьютерного моделирования, начальными данными которого будут значения массы полезной нагрузки и самого робота.
Заключение.
Испытания прототипа доказали работоспособность принципов работы исследуемой модели мобильного робота, передвигающегося с помощью прыжковых локомоций. Начальными данными для указанных экспериментов являлись значения размеров и посадочных мест установки элементов кинематической схемы, которые были получены авторами ранее во время предварительного этапа имитационного моделирования в пакете Simscape Multibody математической среды программирования MATLAB/Simulink. На текущем этапе прототип требует лишь доработки модуля пружины, которая в ходе экспериментов показала непостоянные характеристики жесткости.
Как было показано на опытах, высота прыжка зависит не только от пружины, но и от характеристик самого мотора. На основе полученных экспериментальных данных, было предложено на следующих прототипах установить бесколлекторный электродвигатель с меньшим количеством оборотов на вольт, например, от 800 до 900 KV. Такой мотор будет иметь меньшую задержку на старте и сможет выдавать максимальные обороты за меньший промежуток времени. Мотор с указанными параметрами будет иметь крутящий момент гораздо больше при одинаковом подаваемом на него напряжении в сравнении с мотором, который установлен на описываемом прототипе.
Также, в ходе испытаний был сделан вывод, что для следующего прототипа прыгающего робота должна быть разработана программная настройка системы управления. это связано с тем. что полный цикл прыжка занимает всего секунду, а управление двигателем должно реализовываться не только в процессе разгона, но и во время прыжкового полёта. Программная доработка позволит дистанционно управлять мотором с точностью до сотых долей секунды. Это даст возможность к реализации последовательности управляемых прыжков.
Исследование выполнено при финансовой поддержке БРФФИ в рамках научного проекта №Ф17РМ-035 и РФФИ в рамках научного проекта №17-58-04110 Бел_мол_а.
1. D. W. Haldane, M. Plecnik, J. K. Yim, R. S. Fearing A power modulating leg mechanism for monopedal hopping // IEEE/RSJ International Conference on Intelligent Robotics and Systems (IEEE, 2016), pp. 4757–4764.
2. D. W. Haldane, M. Plecnik, J. K. Yim, R. S. Fearing Robotic Vertical Jumping Agility Via Series-Elastic Power Modulation // Sci. Rob., 2016. (in Press).
3. Лысыч, М.Н. Обзор современных технологий 3D печати // М.Н. Лысыч, М.Л. Шабанов, А.А. Качурин // Современные наукоемкие технологии [Электронный ресурс]. — 2019. Режим доступа : http://www.top-technologies.ru/ru/article/view?id=35053. — Дата доступа : 21.01.2019.
4. Конюшков, Г.В. Основы конструирования механизмов электронной техники: Учебное пособие / Г.В. Конюшков, В.И. Воронин, С.М. Лисовский; под ред. Конюшков Г.В.. — Москва : Дашков и К, 2019. — 184 c.
5. Волкова, Л. Ю. Исследование различных режимов движения робота, перемещающегося с отрывом от поверхности / Л. Ю. Волкова, С. Ф. Яцун // Сборник научных трудов международной молодежной конференции «Мехатроника. Современное состояние и тенденции развития». г. Орехово-Зуево, 2012. С. — 66–71.
6. Яцун С. Ф., Волкова Л. Ю., Рублев С. Б. Исследование управляемого прыжка многозвенного робота // Актуальные вопросы технических наук: материалы II Междунар. науч. конф. — Пермь: Меркурий, 2013. — С. 62-65.
Прокопович Г.А., канд.техн.наук, доцент, заведующий лабораторией робототехнических систем ОИПИ НАН Беларуси, rprakapovich@robotics.by, 284-20-94, +375-29-5098378
Ходаронок А.В., техник лабораторией робототехнических систем ОИПИ НАН Беларуси, hodaronok@gmail.com, 284-01-80, +375-29-9904957
Будков В.Ю., канд.техн.наук, старший научный сотрудник лаборатории автономных робототехнических систем СПИИРАН, budkov@iias.spb.su.