РАСПРЕДЕЛЕНИЕ КРУТЯЩИХ МОМЕНТОВ В ТРАНСМИССИИ ТРАКТОРА 4 х 4 И ИХ ВЛИЯНИЕ НА КИНЕМАТИКУ КАЧЕНИЯ ВЕДУЩИХ КОЛЕС ПРИ БЛОКИРОВАННОЙ СХЕМЕ СВЯЗИ
Назад в рубрику 
А.П. Ляхов, доцент кафедры эксплуатации МТП и агротехнологий БГАТУ, канд. техн. наук, доцент
Т.А. Непарко, зав. каф. эксплуатации МТП и агротехнологий БГАТУ, канд. техн. наук, доцент
Н.Н. Быков, доцент кафедры эксплуатации МТП и агротехнологий БГАТУ, канд. техн. наук
Г.И. Кошля, старший преподаватель кафедры эксплуатации МТП и агротехнологий БГАТУ
В статье приведен метод расчета распределения крутящих моментов по ветвям блокированного межосевого привода 4х4 машинно-тракторного агрегата.
Ключевые слова: крутящий момент, колесо, движитель, буксование, ведущий мост.
The article presents a method for calculating the distribution of torques along the branches of a blocked inter-axle drive 4×4 of a machine-tractor unit.
Key words: torque, wheel, propeller, slipping, drive axle.
Введение
Нынешний этап развития тракторных средств механизации для различных отраслей хозяйственной деятельности характеризуется возросшими удельными мощностями универсально-пропашных тракторов, на базе которых комплектуется большая часть технологических машинно-тракторных агрегатов. Реализация новых концепций таких агрегатов и технологий, путем совмещения технологических операций, обеспечивается многофункциональными высокоуниверсальными технологическими прицепными машинами блочно-модульного построения. В результате чего повышаются требования к оптимальному распределению мощностных и силовых параметров. Причем если перечень возможных состояний структуры моторно-трансмиссионной системы известен заведомо, то динамика этих состояний при работе машинно-тракторного агрегата в конкретных условиях движения заведомо неизвестна, так как это определяется состоянием различных муфт, расчленяющих систему и входящих в конструкцию трансмиссии энергосредства машинно-тракторного агрегата, которые могут быть не только замкнутыми или разомкнутыми, но и находиться в переходном режиме.
Поэтому задача по определению крутящих моментов на конкретных элементах такой трансмиссии представляет достаточно сложную проблему, требующую для решения составления дифференциальных уравнений движения и моделирования с применением ЭВМ динамики трансмиссии в составе всего агрегата. Однако для решения практических проектных и эксплуатационных задач необходимы также удобные аналитические выражения, позволяющие определять распределение крутящих моментов на валах трансмиссии и усилий в шарнирах связей при установившихся скоростях движения агрегата и конечных состояниях трансмиссионных муфт. Цель данной работы и состоит в получении подобных выражений.
Основная часть
На кафедре эксплуатации машинно-тракторного парка учреждения образования «Белорусский государственный аграрный технический университет» ведется исследовательская работа по разработке научно-практических рекомендаций пооперационного использования технических средств, в рамках которой производится определение крутящих моментов в трансмиссии энергосредств агрегатов.
Одно из эффективных направлений совершенствования мобильных сельскохозяйственных агрегатов является повышение тягово-сцепных свойств колесных тракторов путем эффективного использования мощности и веса трактора с распределением его по всем ведущим колесам ходовой системы.
Поиск различных способов повышения тяговых качеств колесных тракторов привело к использованию наиболее эффективного при компоновке по схеме 4х4, при которой все колеса равных радиусов являются ведущими при практически равномерном распределении веса всего трактора в качестве сцепного. Однако результаты выполненных экспериментальных исследований [1, 2] позволили сделать выводы, что коэффициенты сцепления таких колес несколько ниже, чем таких же колес трактора по схеме 4х2 в аналогичных условиях эксплуатации. Эти расхождения связаны со схемой привода ведущих колес и в настоящее время применяются две схемы – блокированная и дифференциальная.
При этом следует отметить, что с целью улучшения проходимости полноприводных тракторов в трудных условиях применяют блокировку трансмиссии. При блокированном приводе имеет место различие в радиусах качения эластичных движителей, что вызывает перераспределение крутящих моментов по ведущим мостам и упругое закручивание валов в результате отклонения величин крутящих моментов от заданных кинематической схемой привода.
Это связано с тем, что во всем диапазоне эксплуатации трактора невозможно обеспечить кинематическое согласование в приводе передних и задних колес. Экспериментально также установлено, что зависимости крутящих моментов колес MK от их буксования δ, силы сопротивления перекатыванию Pf от тяговой нагрузки Pт меняются с изменением кинематического несоответствия скоростей колес
 (1)
(1)
где ωк1, ω к2– угловые скорости вращения колес передней и задней осей;
r0к1, r0к2 – радиусы качения колес передней и задней осей;
Kn, Kr – коэффициенты кинематического несоответствия угловых скоростей и радиусов качения колес.
Значения кинематического несоответствия Kν (радиусов качения ведущих колес) зависит от выбора типа шин и внутреннего давления воздуха в них, технологических допусков на изготовление, нормальных нагрузок на шины и их перераспределения в процессе эксплуатации. Практически величину кинематического несоответствия в межосевом приводе у тракторов с блокированным приводом выбирают в зависимости от соотношения радиусов качения колес.
Особенности блокированного силового привода и распределение крутящих моментов заключаются в том, что крутящие моменты M/к1 передних колес и M/к2задних отличаются от соответствующих моментов Mк1 и Mк2 при отсутствии кинематической и силовой связи мостов на величину момента внутренних сил упругости Mупр, нагружающих силовую передачу. Исследованиями установлено, что знак Mупр зависит от радиуса колеса. Отрицательный момент приложен к колесу с меньшим радиусом (отстающему), а положительный – к колесу с большим радиусом (забегающему). В процессе движения на жестком несминаемом основании выравнивание кинематического несоответствия и поступательных скоростей колес происходит за счет деформации почвы при буксовании. На рис. 1 приведена зависимость касательной силы тяги трактора от величины буксования колес при различном значении кинематического несоответствия Kν.
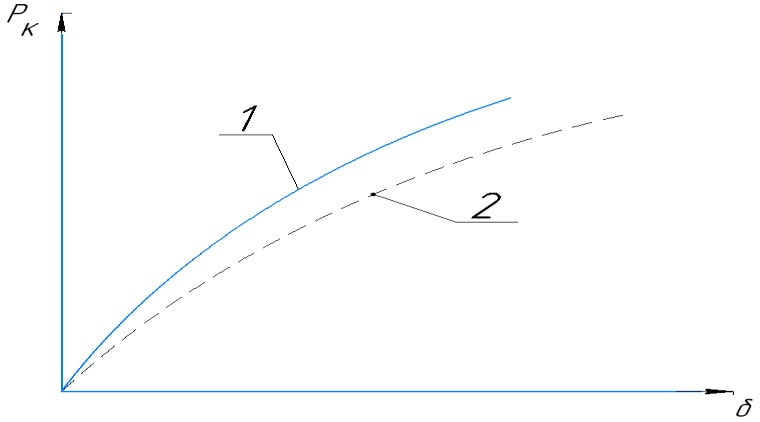
Рис. 1 Зависимость касательной силы тяги трактора от величины буксования колес при различном значении кинематического несоответствия (_____ при Kν =1, _ _ _ при Kν ≠1)
Оценку упругих свойств шин в тангенциальном направлении на несминаемом основании согласно ГОСТ 17697-72 «Автомобили. Качение колеса. Термины и определения» оценивают коэффициентом тангенциальной эластичности  В практическом значении коэффициент λr является отношением
В практическом значении коэффициент λr является отношением
 (2)
(2)
где r0кi – радиус качения i — го колеса в ведомом режиме;
r0кi – радиус качения i — го колеса при приложении крутящего момента Mкi.
Радиусы качения rкi и r0кi ведущих колес взаимосвязаны
![]() (3)
(3)
где δi – буксование i — го колеса.
При движении трактора с блокированной трансмиссией и кинематическим рассогласованием ведущих колес имеют место три случая неравномерного распределения крутящих моментов по мостам: моменты имеют положительные значения; один момент имеет положительное значение, другой – отрицательное, причем за время выравнивания радиусов rк1 и rк2 колеса не скользят; моменты имеют разные знаки, причем из-за значительного различия rк1 и rк2 их выравнивание происходит при скольжении колес одной или обеих осей, при этом наличие отрицательного крутящего момента на колесах одной из осей наблюдается явление циркуляции мощности в блокированной трансмиссии.
Для упрощения процесса выравнивания радиусов качения колес трактора с формулой 4х4 рассмотрим движение в ведомом режиме, принимая следующие допущения: коэффициенты тангенциальной эластичности шин правого и левого бортов равны λ1=λ2=λ; передаточные числа главных передач одинаковы, зазоры в приводе отсутствуют, скорость движения трактора постоянная.
В этом случае уравнение движения трактора имеет вид
 , (4)
, (4)
где α – относительное угловое перемещение колес;
cт – приведенный коэффициент жесткости привода от первой оси до второй;
rвкi – радиус качения i — го колеса в ведомом режиме.
Обозначая rвк1—rвк2=Δr и выполнив преобразование получим
 (5)
(5)
Интегрирование этого выражения дает зависимость пути, проходимого трактором для выравнивания радиусов качения колес
 (6)
(6)
Для определения постоянной интегрирования примем начальные условия α=0 при s=0
 (7)
(7)
Подставив выражение (7) в (6) получим формулу для пути, на котором произойдет выравнивание радиусов качения
 (8)
(8)
Условия, при которых произойдет выравнивание текущих радиусов качения представляются в виде
 (9)
(9)
где rк1, rк2 – текущие значения радиусов качения колес переднего и заднего мостов.
Условие выравнивания радиусов качения rк1=rк2 или как следует из выражения (9) ![]()
или ![]() (10)
(10)
Анализируя выражение (8) с учетом зависимости (10) приходим к выводу, что последний член выражения (8) равен бесконечности, а первые два – имеют конечные значения, что позволяет произвести упрощение (8) и сделать вывод, что путь выравнивания радиусов качения равен бесконечности
 (11)
(11)
Из выражения (11) угол α равен
 (12)
(12)
а значение показателя степени равно
 (13)
(13)
Принимая во внимание, что при большом значении n можно принять  , выражение (12) принимает вид
, выражение (12) принимает вид
 (14)
(14)
Используя выражение (9) с учетом (12) получим зависимости выравнивания радиусов качения колес rк1 и rк2 от пути s
 . (15)
. (15)
Зависимость радиуса качения колес от пути передней и задней осей энергосредства с колесной формулой 4х4 по данным эксперимента приведена на рис. 2 [3], из которого следует, что радиусы качения rк1 и rк2 в зависимости от пройденного пути изменяются нелинейно, и уже после 1,0-1,5 метров можно с некоторым приближением считать их выровненными.

Рис. 2 Зависимость радиусов качения от пути при движении энергосредства с колесной формулой 4х4
Рассмотрим факторы, влияющие на упругое скручивание валов трансмиссии.
Первая группа факторов связана с особенностями конструкции движителей, точностью их изготовления, а также изменением их состояния в процессе эксплуатации. Результаты исследований показывают, наименьший упругий момент скручивания валов привода, а следовательно и путь выравнивания радиусов качения имеют движители с шинами высокого давления и регулируемым давлением воздуха. Наибольший путь выравнивания радиусов качения и склонность к возникновению циркуляции мощности имеют место у энергосредств с арочными шинами, шинами типа «Р», за счет меньших значений коэффициентов тангенциальной эластичности λ. Значительно влияет на значение λ и число слоев корда каркаса шины, а также отклонения величин свободных радиусов от номинальных при изготовлении шин, доходящих до 3-4 %. При разбросе размеров свободных радиусов в пределах 3-4 % радиусы качения этих шин отличаются друг от друга на такую же величину. Существенное влияние на радиусы качения колес многоприводных движителей оказывает различие в величине внутреннего давления в шинах. Неравномерный износ протектора шин влияет на значение коэффициента λ и при полном износе протектора уменьшается до 25 % по сравнению с неизношенным протектором.
Вторая группа факторов связана с конструктивными особенностями энергетического средства (тип трансмиссии, компоновка и т.д.). Значительное влияние на возникновение внутренних сил упругости оказывает перераспределение нагрузки на движители при движении, особенно это проявляется при действии силы тяги на крюке трактора.
Третья группа факторов связана с особенностями условий эксплуатации. Неодинаковые окружные зазоры в приводе к ведущим мостам и в трансмиссии приводят при трогании к неодновременному нагружению ведущих колес и перераспределению крутящих моментов по ведущим мостам.
Продольные угловые колебания корпуса машины при движении приводит к динамическому перераспределению крутящих моментов и появлению динамической циркуляции мощности. При движении на поворотах, колеса того или иного борта проходят разные расстояния, что приводит к перераспределению крутящих моментов.
Заключение
1. Улучшение эксплуатационных и тягово-сцепных свойств энергетических средств машинно-тракторных агрегатов связано с использованием всех колес в качестве ведущих. В этом случае практически весь вес трактора используется в качестве сцепного и способствует реализации силы тяги.
2. Тяговая динамика энергосредств со всеми ведущими колесами зависит от типа привода, влияющего на распределение крутящих моментов по осям движителя, и в большинстве конструкций применяются их два типа – блокированный и дифференциальный. При блокированном приводе две и более ведущих оси энергетического средства жестко связаны между собой и вследствие этого между угловыми скоростями колес существует неизменное соотношение. При дифференциальном приводе связь между осями происходит через включенный межосевой дифференциал, что влияет на соотношение скоростей и крутящих моментов.
3. Наиболее сложным режимом при движении энергосредств является работа движителя с блокированным приводом, основной фактор которого – кинематическое несоответствие передних и задних ведущих колес, что приводит к разнице окружных скоростей, упругому закручиванию валов и возможности возникновения и циркуляции паразитной мощности, ухудшающей тяговые свойства трактора. Снижение величины коэффициента кинематического несоответствия может быть достигнуто при определенных значениях буксования передних и задних колес и практически устранено при прямолинейном движении на рыхлых почвах с достаточной величиной силы тяги на крюке.
4. Применение дифференциального привода вследствие наличия сил внутреннего трения в дифференциале имеет место зона нечувствительности и дифференциальный привод превращается в блокированный и вступает в работу лишь тогда, когда на его осях создается разность моментов достаточная для преодоления сил трения. Кроме этого сила тяги трактора зависит от силы тяги колес, находящихся в худших условиях по сцеплению, что является явным недостатком дифференциального привода.
5. В статье рассмотрены факторы, влияющие на распределение крутящих моментов в трансмиссии энергосредств с колесной формулой 4х4, и возможные способы уменьшения кинематического несоответствия между ведущими колесами.
Список использованных источников
1. Кацыгин, В.В. Перспективные мобильные энергетические средства (МЭС) для сельскохозяйственного производства / В.В. Кацыгин, Г.С. Горин, А.А. Зенькович, Г.В. Кидалинская, А.И. Неверов, А.Н. Орда.– Мн.: Наука и техника, 1982.– 272 с.
2. Чудаков, Д.А. Основы теории и расчета трактора и автомобиля – М.: Колос, 1972.– 384 с.
3. Бочаров, Н.Ф. Транспортные средства на высокоэластичных движителях / Н.Ф. Бочаров, В.И. Гусев [и др.] – М. : Машиностроение, 1974. – 208 с.
4. Бочаров, Н.Ф. Распределение крутящих моментов в трансмиссии многоприводных колесных машин на твердых дорогах // Серия «Машиностроение» .– 1964.–№ 12.– С. 111-131.
5. Бочаров, Н.Ф. К вопросу неравномерного распределения крутящих моментов по мостам трехосного автомобиля / Н.Ф. Бочаров [и др. ] // «Автомобильная промышленность».– 1968.–№ 7.– С. 20-24.
6. Агейкин, Я.С. Вездеходные колесные и комбинированные движители. – М. : Машиностроение, 1972. – 184 с.
7. Петрушов, В.А. Сопротивление качению автомобилей и автопоездов / В.А. Петрушов [и др. ] – М. : Машиностроение, 1975. – 225 с.
8. Ечеистов, Ю.А. Распределение крутящего момента по ведущим осям автомобиля с блокируемым приводом // «Автомобильная промышленность».– 1964.– № 2.– С. 19-23.
9. Кноров В.И. Работа автомобильной шины / В.И. Кноров [и др. ] – М. : Транспорт, 1976. – 238 с.