- — подавление высших гармоник;
- — коррекцию коэффициента мощности;
- — уменьшение колебания напряжения;
- — коррекцию частотных характеристик сети и исключение параллельных резонансов [2].
АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРЁХФАЗНЫМ АКТИВНЫМ ФИЛЬТРОМ ВЫСШИХ ГАРМОНИК НА ОСНОВЕ НЕЙРОCЕТЕВЫХ ТЕХНОЛОГИЙ
Назад в рубрику 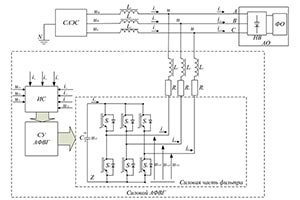
УДК 621.361
Первенёнок Р.Е., Сицко А.Л.
Военная академия Республики Беларусь
Разработана эффективная адаптивная система управления трёхфазным активным фильтром на основе нейросетевых технологий. На основании разработанной математической модели системы построена имитационная модель в среде Matlab 2014a и приведены результаты моделирования ее работы.
An effective adaptive control system of three-phase active filter based on neural network technologies has been developed. Based on the developed mathematical model of the system, a simulation model in the Matlab 2014a environment is constructed and the results of modeling its work are presented.
Введение
Неактивная мощность в электрических системах увеличивается с ростом нелинейных устройств, создающих при своей работе токи несинусоидальной формы, что приводит к ухудшению качества электрической энергии. Такими устройствами являются импульсные источники питания, приводы электродвигателей с регулируемой скоростью вращения, пускорегулирующие аппараты для электролюминесцентных ламп и др. [1].
Традиционно для подавления высших гармоник в сетях электроснабжения используются пассивные фильтры гармоник (ПФГ). Основной недостаток пассивных фильтров – возможность возникновения резонанса токов в параллельном колебательном контуре, образуемого фильтром и индуктивностью питающей сети.
В последние годы значительный интерес проявляется к активным фильтрам гармоник. Такой фильтр представляет устройство коммутации, характеристики которого формируются с помощью специального закона управления.
АФВГ выполняет одновременно несколько функций:
Принцип действия АФВГ основан на анализе гармоник тока или напряжения нелинейной нагрузки и генерации в систему электроснабжения (СЭС) таких же гармоник тока или напряжения, но с противоположной фазой. В результате, высшие гармонические составляющие тока или напряжения компенсируются в точке подключения АФВГ и не распространяются в СЭС. Важнейшим компонентом активного фильтра гармоник является система управления (СУ), формирующая сигнал управления силовой частью фильтра [3].
Характеристики АФВГ существенно зависят от метода формирования управляющих сигналов. Научный и практический интерес представляет создание быстродействующего управления АФВГ, реализуемого на основе алгоритма формирования управляющих сигналов с использованием метода нейронных сетей [5]. Использование метода нейронных сетей является перспективным направлением повышения эффективности фильтрующих и компенсационных свойств АФВГ.
Статья посвящена разработке компенсатора мощности искажений и реактивной мощности на основе АФВГ с адаптивной системой управления на основе алгоритма формирования управляющих сигналов с использованием метода нейронных сетей, а также исследованию на имитационной модели электропотребителей при установившихся и динамических режимах их работы, а также сравнению данного метода с методом на основе использования гистерезисного регулятора.
Математическая модель активного фильтра высших гармоник
Основная структура трехфазного трехпроводного АФВГ показан на рисунке 1. АФВГ состоит из измерительной системы (ИС), системы управления (СУ) и силовой части.
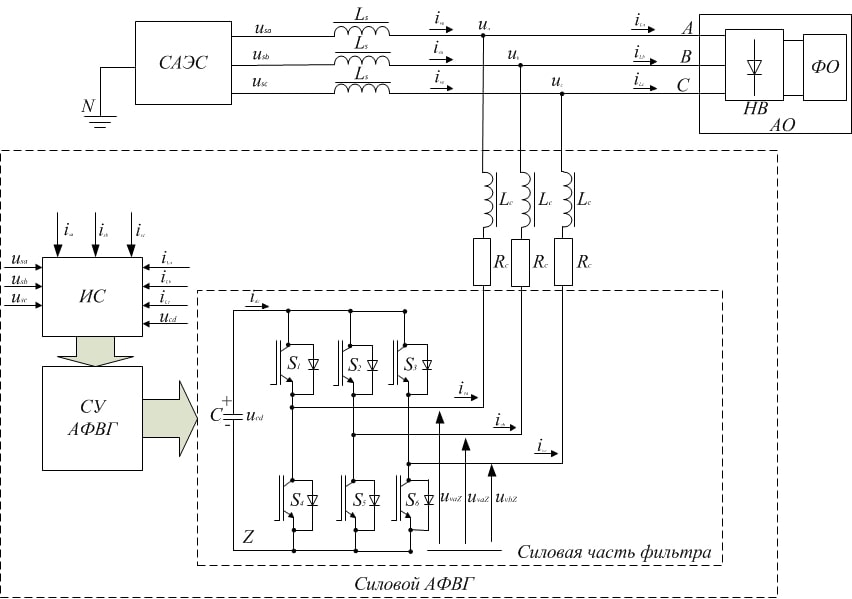
Рисунок 1. – Структура АФВГ
Ls – индуктивность питающей сети системы автономного электроснабжения (САЭС); isa, isb, isc – ток САЭС; iLa, iLb, iL c – ток нагрузки; ua, ub, uc являются напряжениями СЭС в точках соединения; ivа, ivb, ivс – ток компенсации АФВГ; C является конденсатором на стороне постоянной составляющей; Ucd является напряжением на конденсаторе C; idc – ток конденсатора C; Lфс – индуктивность на стороне переменного тока СЭС; Rc – эквивалентное сопротивление; S1, …S6 – управляемые ключи выполненные на шести IGBT транзисторах, шунтированных обратными диодами, ИС – измерительная система, НВ – неуправляемый выпрямитель, АО – автономный объект, ФО – функциональное оборудование.
На основе теории электрических цепей и законов Кирхгофа получены следующие выражения:
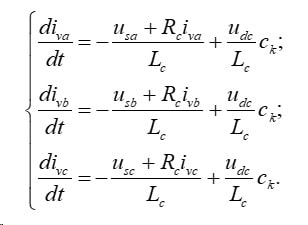 (1)
(1)
где ck – функция переключения.
ck, определяет состояние ключей S1 … S6:
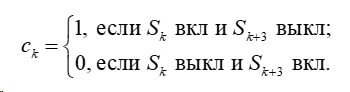 (2)
(2)
где k = 1, 2, 3.
Математическая модель АФВГ в векторной форме может быть переписана:
 (3)
(3)
где iv=[iva,ivb,ivc]T; us=[isa,isb,isc]T .
Расчёт адаптивного нейроконтроллера
Радиальная нейронная сеть (Radial Basis Function, далее RBF) использует радиальные функции в качестве основной функций активации. Основная архитектура RBF-сети три слоя: входной слой, скрытый слой и результирующий слой [6]. Входной слой состоит из сенсорных элементов, которые связывают сеть с внешней средой. Второй слой является единственным скрытым (hidden) слоем сети. Он выполняет нелинейное преобразование входного пространства в скрытое. В большинстве реализаций скрытое пространство имеет более высокую размерность, чем входное. Математическое обоснование целесообразности последовательного применения нелинейного и линейного преобразований приведено в [9]. Согласно этой работе, задача классификации данных в пространстве более высокой размерности с большей вероятностью удовлетворяет требованию линейной разделимости. Поэтому в RBF-сетях размерность скрытого слоя, как правило, существенно превышает размерность входного слоя. Результирующий слой выполняет простую взвешенную сумму с линейным результатом. RBF-сеть схожа с многослойной сетью прямого распространения и является универсальным аппроксиматором при достаточном количестве входных значений. Поэтому RBF-сеть позволяет ускорить скорость обучения и убрать проблему локального минимума, делая её подходящей для управления в режиме реального времени АФВГ.
Выход RBF-сети может быть выражен:
 (4)
(4)
где m является числом нейронов скрытого слоя; wj – весовые коэффициенты между скрытым слоем и результирующим слоем; hj является выходом из скрытого слоя.
В RBF-сети s = [s1, …, sn]T – входной вектор, где n – количество входных данных. Принимаем ошибку слежения e = iv* – iv, как s. Радиально– базисный вектор из RBF h(s) = [h1, … hj, … hm]T, hj – это Гауссова функция, которая записывается:
 (5)
(5)
Где qj – ширина «окна» активационной функции для входов j; Q – ширина «окна» активационной функции для всех входов; Q-Q=[q1…qj…qm] T, cj – центральные векторы активационной RBF нейронной сети для j входов, cj=[cj1…cji…cjn]T. Весовые коэффициенты для RBF-сети w=[w1…wm]T.
Для расчета зададимся параметрами RBF-сети:
N=3;m=27;cj=[-13,-12,…-1,0,1,…12,13] T;Q=[2…2…2]T

Рисунок 2. – Структурная схема адаптивной системы управления с RBF-сетю
Математическая модель нейроконтроллера с RBF-сетью
Структурная схема адаптивной системы управления с RBF-сетью приведена на рисунке 2. Используя ошибку слежения s между током высших гармоник iv и сформированным АФВГ током компенсации высших гармоник iv*, происходит гауссова аппроксимация ошибки s и настройка весовых коэффициентов по адаптивному закону, далее полученные сигналы поступают на нейроконтроллер. Нейрокотроллер на основании полученных данных формирует сигнал управления ключами S1, … S6. Таким образом, ток компенсации минимизирует гармонические искажения. Подробнее работу можно описать следующими уравнениями.
Математическая модель АФВГ может быть записана:
 (6)
(6)
где 
Основная задача адаптивного управления с RBF-сетью состоит в том, чтобы x и x* были равны, то есть ошибка слежения e= x* – x стремилась к нулю. Сигнал u представляет собой переключающийся функцию, которая является выходом RBF-сети и записывается u=u(s/W).
Дифференцируя ошибку e, получаем:
 (7)
(7)
где K = r/L ошибка аппроксимации при оптимальных весовых коэффициентах W*.
Оптимальный вес может быть определен:
 (8)
(8)
где sup представляет верхнюю границу ошибки.
Наименьшая ошибка управления RBF-сети определяется:
 (9)
(9)
Подставив (9) в (7) получаем
 (10)
(10)
Далее определяется устойчивость по функции Ляпунова
 (11)
(11)
где γ – положительная постоянная; p – положительная постоянная которая удовлетворяет 2Kp = q, где q – положительная постоянная.
Дифференцируя V относительно времени, получаем:
 (12)
(12)
Адаптивный закон выбираем:
 (13)
(13)
где γ – постоянный коэффициент адаптации.
Подставив (12) в (13) получаем
 (14)
(14)
Поскольку q, p, b> 0, для универсальной теоремы аппроксимации, ε может быть минимальной используя нечеткую систему на ограниченной области, а также может быть равной нулю, таким образом:
 . Неравенство
. Неравенство  подразумевает, что e(t), ограничены и
подразумевает, что e(t), ограничены и  Поскольку
Поскольку  конечный и конечный, соответственно лемме Барбалата [7], e будет сходиться к нулю асимптотически
конечный и конечный, соответственно лемме Барбалата [7], e будет сходиться к нулю асимптотически ![]() . Таким образом система гарантирует асимптотическую устойчивость.
. Таким образом система гарантирует асимптотическую устойчивость.
Исследование математической модели АФВГ
Для исследования, спроектированного АФВГ с адаптивной СУ, в программной среде Matlab/Simulink в пакете SimPowerToolbox был смоделирован процесс влияния на питающую сеть нелинейной нагрузки АОВ -вентильного преобразователя до включения АФВГ и после его включения. Анализ влияния проведен для неуправляемого трехфазного мостового выпрямителя, работающего на активно-емкостную нагрузку где R=16 Ом, C = 4,9 мФ.
Параметры RBF-сети выбраны следующим образом: входной слой n = 3, скрытый слой m = 27, выходной слой 3, скорость обучения γ = 80, ширина «окна» активационной функции Q=[2…2…2]T, центральные векторы активационной RBF-сети cj=[-13,-12,…-1,0,1,…12,13]T.
Параметры АФВГ выбраны следующим образом: ПИ-контроллер используется для управления на стороне постоянного напряжения, kp = 0,08, ki = 0, индуктивность на стороне переменной составляющей равна L=5 мГн, напряжение на конденсаторе vdc =900 В.
Рисунок 3. – График тока фазы А до включения и после включения АФВГ с адаптивной системой управления
На рисунке 3 изображен график тока фазы А до включения и после включения АФВГ с адаптивной системой управления. Наглядно работу АФВГ можно увидеть по рисункам 4-5, до 0,04 секунды ток фазы А содержит высшие гармоники. Полное гармоническое искажение (Total Harmonic Distorsions, далее THD) составляет 23,78%.
Рисунок 4. – График и гармоники тока фазы А до включения АФВГ с адаптивной системой управления
Рисунок 5. – График и гармоники тока фазы А после включения АФВГ с адаптивной системой управления
После 0,04 секунды АФВГ начинает работать, из рисунка 5 можно увидеть, что ток фазы А близок к синусоиде за время не более, чем 0,01 секунд. THD составляет 1,83%.
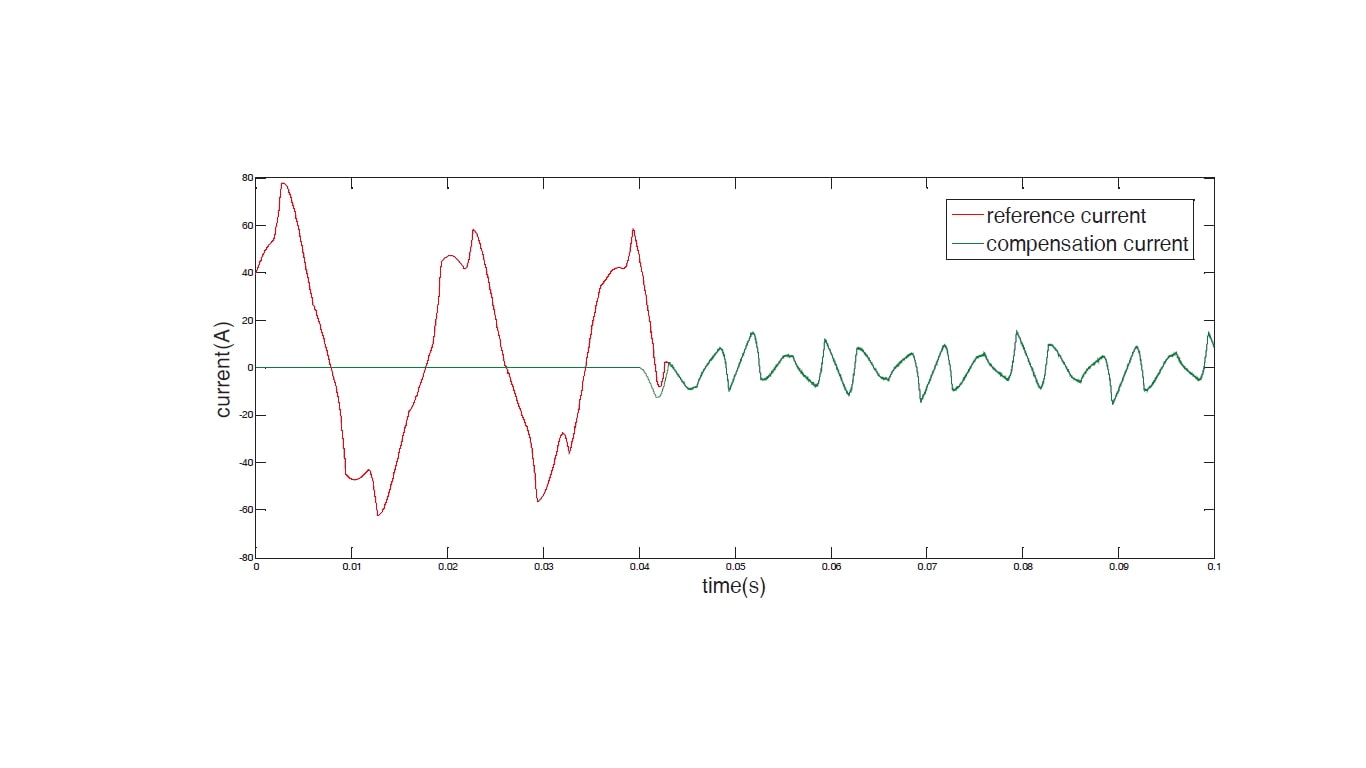
Рисунок 6. – График опорного тока и тока компенсации
На рисунке 6 изображен график опорного тока и тока компенсации. Из графика видно, что ток компенсации может сформироваться в течение 0,045 секунды. Отсюда следует, что ток высших гармоник устранен, ток фазы А близок к синусоиде и THD уменьшился соответственно.
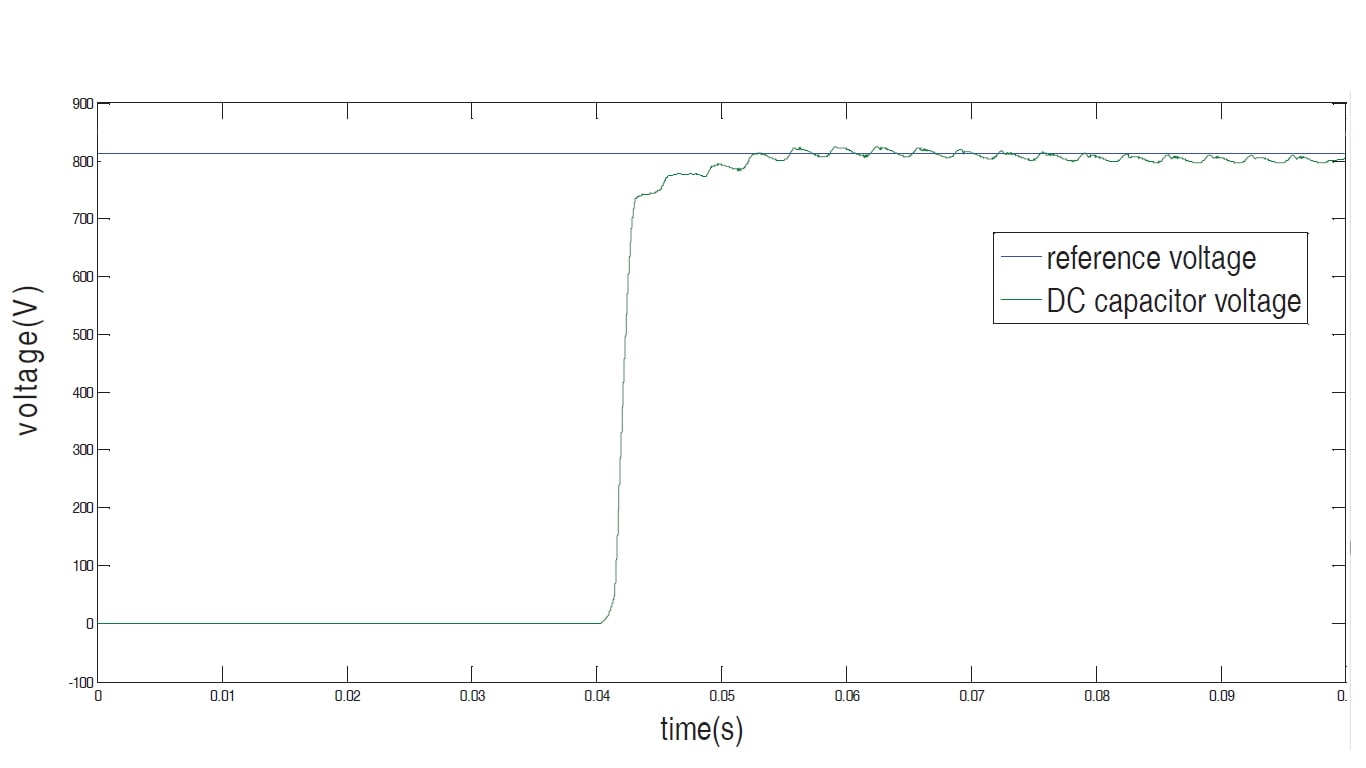
Рисунок 7. – Динамическая кривая напряжения на стороне постоянной составляющей
На рисунке 7 изображена динамическая кривая напряжения на стороне постоянной составляющей, ПИ-микроконтроллер быстро отслеживает опорное напряжение, и поддерживает его на установленном уровне. Из рисунка 7 видно, что есть небольшие флуктуации напряжения.
Чтобы продемонстрировать что АФВГ с адаптивной СУ имеет лучшие компенсационные характеристики, по сравнению с другими методами, рассмотрим АФВГ с управлением по гистерезису, при работе на тот же тип нагрузки.
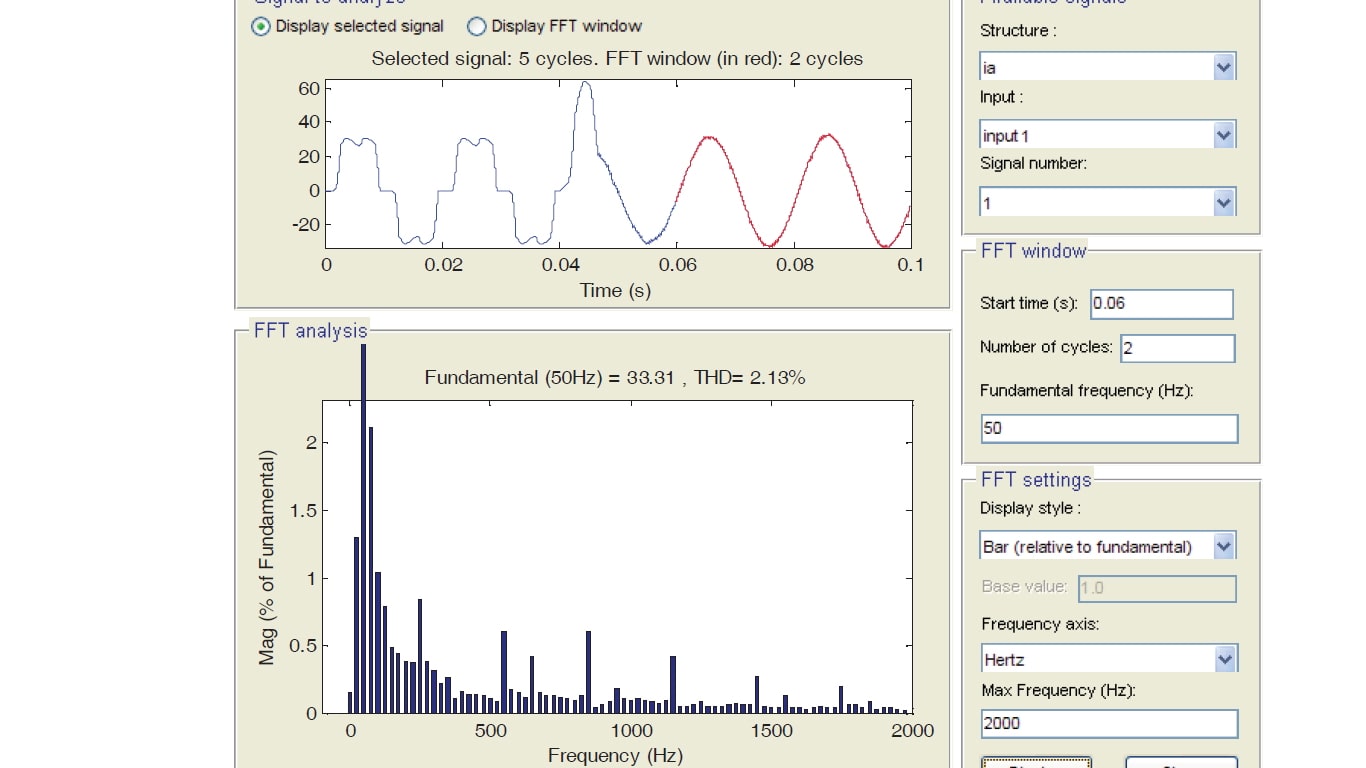
Рисунок 8. – Гармонический анализ тока после включения АФВГ
с использованием гистерезисного регулятора
На рисунке 8 изображен гармонический анализ тока после включения АФВГ с использованием гистерезисного регулятора, THD – 2,13%, который выше, чем при использовании АФВГ с адаптивной СУ, THD – 1,83%.
Заключение
Полученный АФВГ с адаптивной СУ имеет достоинства, выражаемые в более гибкой, надежной и эффективной системе управления, которая обеспечивает получение мгновенного значения тока компенсации по измеренным значениям кривой тока нагрузки. Вычисления возможно проводить режиме реального времени.
Полученный алгоритм формирования тока задания не требует реализации векторных преобразований, цифровых фильтров нижних частот, большого массива цифровых отсчетов измеряемых величин тока и напряжения для осуществления быстрого преобразования Фурье. Это дает возможность оперативно реагировать на динамические изменения нагрузки, что характерно для работы ФО АО.
Реализация изложенного принципа построения адаптивного метода управления с RBF-сетью на основе параллельного АФВГ обеспечит невысокую себестоимость фильтра и упрощение его реализации и эксплуатации, что в сочетании с предлагаемым методом получения «идеального» тока позволяет создать эффективный АФВГ для системы САЭС — АО.
Литература
1. Железко, Ю.С. Потери электроэнергии, реактивная мощность, качество электроэнергии / Ю.С. Железко − Москва: ЭНАС, 2009. − 230 с.
2. Жежеленко, И. В. Высшие гармоники в системах электроснабжения промышленных предприятий/ И. В. Жежеленко. — 4-е изд., перераб. и доп. − М.: Энергоатомиздат, 2000. −331 с.
3. Шрейнер, Р. Т. Активный фильтр как новый элемент энергосберегающих систем электропривода / Р. Т. Шрейнер, А. А. Ефимов // Электричество. − 2000. − № 3. − С. 46-54.
4. Лютаревич, А.Г. Повышение качества электроэнергии за счет снижения несинусоидальности кривой напряжения / Д.С. Осипов, А.Г. Лютаревич, С.Ю. Долингер, В.В. Харламов // Омский гос. техн. ун-т. − Омск, 2009. − 14 с. Деп. в ВИНИТИ 30.09.09, № 606. − В 2009.
5. Боярская, Н.П. Адаптивная система формирования управляющих сигналов для активных фильтров гармоник / Н. П. Боярская, А.М. Дербенев, В. П. Довгун // Ползуновский вестник. – №2/1. – 2011. – С. 25-29.
6. Хайкин, С. Нейронные сети: полный курс, 2-е издание. / С.Хайкин. – М.: Издательский дом «Вильямс», 2006. – 1104 с. – ISBN 5-8459-0890-6.
7. Popov V. M. Hyperstability of control systems. − 1973.
8. S. Masjedi, M. Ahmadi, E. Pashajavid, Improved shunt APF based on using adaptive RBF neural network and modified hysteresis current control, International Symposium on Power Electronics Electrical Drives Automation and Motion, pp.216-220, 2010.
9. Cover T.M. “Geometrical and statistical properties of systems of linear inequalities with aplications in pattern recognition”, IEEE Transactions on Electronic Computers, 1965, vol. EC-14, p. 326-334.