- − генератор переменного тока, который включает в себя подвозбудитель (ПВ), возбудитель (В), синхронный генератор (СГ);
- − аналоговый регулятор напряжения БРН120Т5А, включающий в себя фазосдвигающее устройство (ФСУ), измеритель реактивной мощности генератора (ИРМ), формирователи импульсов (ФИ), звено гибкой отрицательной обратной связи (ГОС), усилитель мощности (УМ), измерительный орган напряжения (ИО);
- − цифровой корректор напряжения, содержащий специализированную бортовую цифровую вычислительную машину (СБЦВМ), аналого-цифровой преобразователь (АЦП), цифро-аналоговый преобразователь (ЦАП).
- – в полнофазном режиме – напряжение, среднее по трем фазам;
- – в неполнофазном режиме – напряжение в одной из фаз.
РОЛЬ И МЕСТО РЕГУЛЯТРОВ НАПРЯЖЕНИЯ В ЭЛЕКТОЭНЕРГЕТИЧЕСКОМ КОМПЛЕКСЕ ВОЗДУШНЫХ СУДОВ КОНЦЕПЦИИ АLL ELECTRIC AIRCRAFT
Назад в рубрикуА.Г. Капустин, кандидат технических наук, доцент
Н.С. Карнаухов, курсант
(УО «Белорусская государственная академия авиации»)
Исследования по разработке концепции «полностью электрического самолета» (All electric aircraft) начались в конце 1970-х годов. За рубежом стремление к созданию самолета с полностью электрифицированным оборудованием появилось в результате исследований по программе энергетически эффективного самолета. Эта программа наряду с усовершенствованиями аэродинамики, силовой установки и конструкции планера рассматривала возможности повышения летно-технических характеристик самолета путем ликвидации отбора воздуха от авиадвигателя, применения электродистанционных систем управления полетом, создания единой вторичной энергосистемы [1,2,3,4].
На основании проведенных исследований было определено, что замена всех видов энергии на борту самолета только на электрическую энергию должна, в конечном итоге, обеспечить улучшение аэродинамических характеристик самолета, увеличение дальности полета, снижение массы авиадвигателя и самолета, улучшение режимов работы силовой установки, уменьшение расхода топлива и т.д. [2,3,5].
Опыт эксплуатации воздушных судов показал, что с точки зрения универсальности, надежности, удобства эксплуатации и унификации оборудования электрическая энергия обладает существенными преимуществами перед другими видами энергии. При этом существенным является то, что электрическая энергия облегчает процесс автоматизации оборудования воздушных судов, а полная комплексная автоматизация на воздушных судов возможна лишь в том случае, если управление им частично или полностью электрифицировано. В результате чего появились воздушные суда с повышенным уровнем электрификации: пассажирские – Аirbus A380 и Boeing 787 Dreamliner, истребитель F-35, беспилотный летательный аппарат «Барракуда» и др., на которых реализованы многие положения концепции All electric aircraft.

Рисунок 1 – Основные системы воздушного судна «All electric aircraft»
Повышение уровня электрификации «полностью электрических самолетов», естественно, будет сопровождаться увеличением мощности как источников электрической энергии, так и системы электроснабжения в целом (рисунок 2). Исследования показали, что мощность системы электроснабжения должна быть увеличена примерно в 2–3 раза в зависимости от типа воздушного судна, а мощность одного канала генерирования может достигать 300 кВА [3,5,6].
В настоящее время на зарубежных воздушных судах с повышенным уровнем электрификации уже устанавливаются генераторы, мощность которых превышает 200 кВА. Так, на самолете Boeing 787 Dreamliner устанавливаются 4 основных генератора переменного тока мощностью 250 кВА каждый, приводящиеся во вращение от авиационных двигателей и два генератора мощностью 225 кВА, установленные на вспомогательной силовой установке. Общая установленная мощность источников электрической энергии на данном воздушном судне составляет 1450 кВА. На Аirbus A380 мощность одного источника электрической энергии составляет 150 кВА, а суммарная мощность системы электроснабжения достигает 840 кВА. На перспективном магистральном воздушном судне МС-21 также предполагается значительная электрификация систем бортового оборудования и, как следствие, установка мощных источников электроэнергии. В связи со значительным увеличением мощности энергосистемы остро встает вопрос о выборе рационального вида электроэнергии, вырабатываемой первичными источниками (генераторами) и обеспечение норм качества электроэнергии [2,3,5,6].
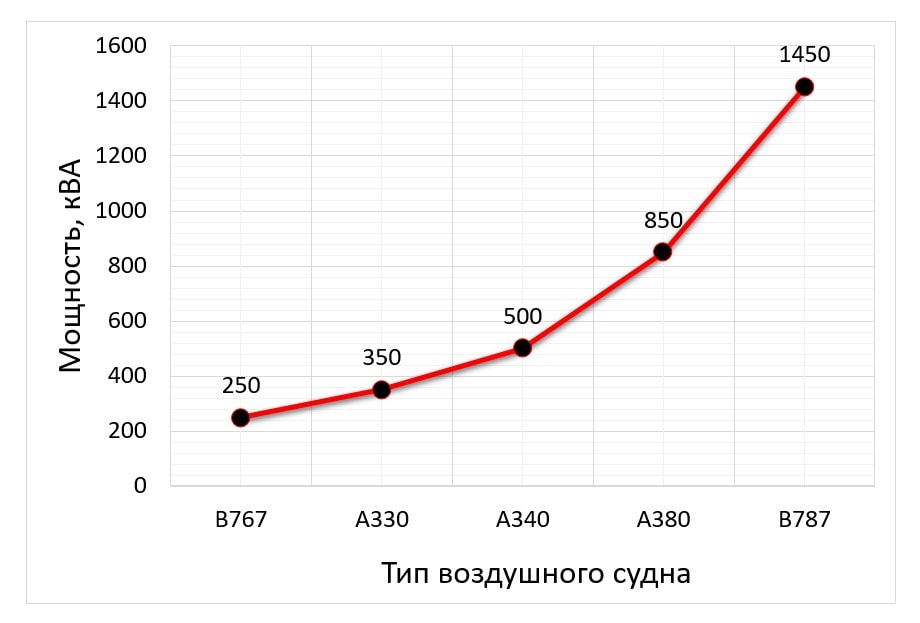
Рисунок 2 − Мощность электроэнергетических систем различных воздушных судов
Достижение этих показателей связано с разработкой новых концепций построения функциональных систем воздушных судов, взаимодействующих в реальном масштабе времени под управлением бортовых компьютеров с высоким быстродействием.
Для нормальной работы приемников электрической энергии, находящихся на борту воздушного судна, напряжение самолетных генераторов должно меняться в узких пределах независимо от режима полета воздушного судна, а также величины и характера электрической нагрузки на генератор. Поэтому все авиационные генераторы работают в совокупности с регуляторами напряжения (PH), обеспечивающими стабилизацию напряжения генераторов на заданном уровне.
В авиации на практике нашел применение лишь метод регулирования напряжения путем изменения магнитного потока электрической машины [7]. Изменение, тока в обмотке возбуждения генератора достигается изменением сопротивления цепи этой обмотки. В качестве регулируемых сопротивлений, включаемых в цепь обмотки возбуждения, обычно применяют магнитные усилители или полупроводниковые приборы [7].
В структурную схему любого регулятора напряжения
(рисунок 3) обычно входят в том или ином виде: измерительный орган (ИО), усилитель (У), исполнительный орган (ИСП) и устройство обратной связи (ОС).
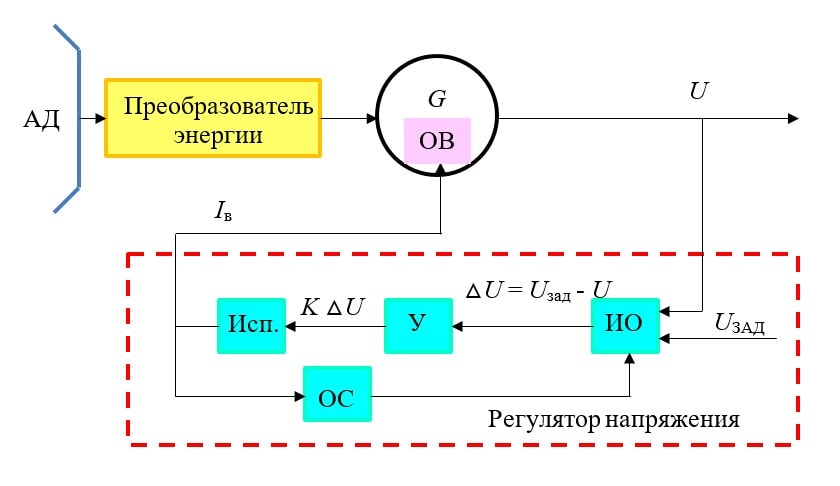
Рисунок 3 – Структурная схема регулятора напряжения
Измерительный орган формирует сигнал ΔU, пропорциональный отклонению регулируемого напряжения U от заданного (эталонного) напряжения Uзад. Этот сигнал после усиления усилителем поступает на исполнительный орган, который изменяет ток Iв в обмотке возбуждения генератора, что в конечном итоге приводит к восстановлению напряжения генератора до номинального значения (без учета статической ошибки регулирования) [7].
Регулятор напряжения, являясь одним из важнейших узлов системы электроснабжения. в значительной степени определяет ее параметры: качество электрической энергии, надежность и др., и работает в режиме переключения. В этом случае потери в полупроводниковых приборах минимальны, а в цепи возбуждения генератора можно получить значительные мощности при достаточно высоком КПД. Кроме того, в таком режиме работы полупроводниковый прибор относительно некритичен к разносу параметров и к колебаниям температуры окружающей среды [7].
В настоящее время на воздушных судах успешно эксплуатируются полупроводниковые регуляторы напряжения, такие как БРН120Т5А, РНТ115ВО, РН116В и др.
Функциональная схема серийного регулятора напряжения БРН120Т5А (рисунок 4) включает в свой состав измерительный орган напряжения (ИО), фазосдвигающее устройство (ФСУ), формирователи импульсов (ФИ), усилитель мощности (УМ), измеритель реактивной мощности генератора (ИРМ) и звено гибкой отрицательной обратной связи (ГОС). Для обеспечения автономности работы регулятора все его элементы получают электропитание от подвозбудителя генератора (ИВ).
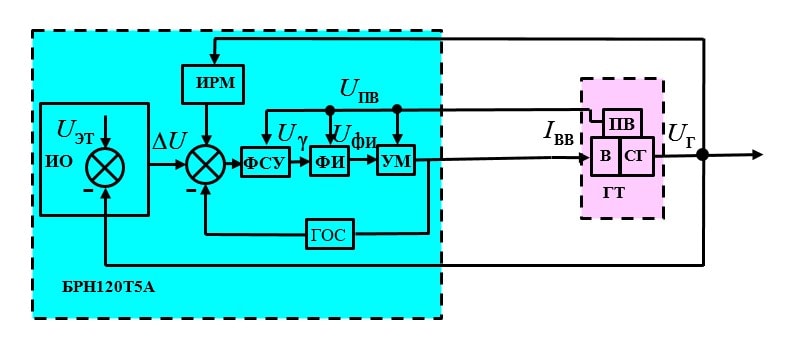
Рисунок 4 – Функциональная схема блока БРН120Т5А
Эксплуатируется и другой регулятор напряжения − РНТ115ВО. Он входит в состав блока регулирования, защиты и управления БРЗУ115ВО и работает совместно с синхронными генераторами переменного трехфазного тока типа ГТ (генератор трехфазный).
Структурная схема регулятора (рисунок 5) включает в свой состав следующие узлы:
СВНН – схему выделения наибольших напряжений; ФОН – формирователь опорного напряжения; ФПН – формирователь пилообразного напряжения; A1 – компаратор; СЧ – силовая часть; КУ – корректирующее устройство; ПЧН – преобразователь частота-напряжение.
Регулятор представляет собой замкнутую систему автоматического регулирования по отклонению выходного параметра – напряжения генератора.
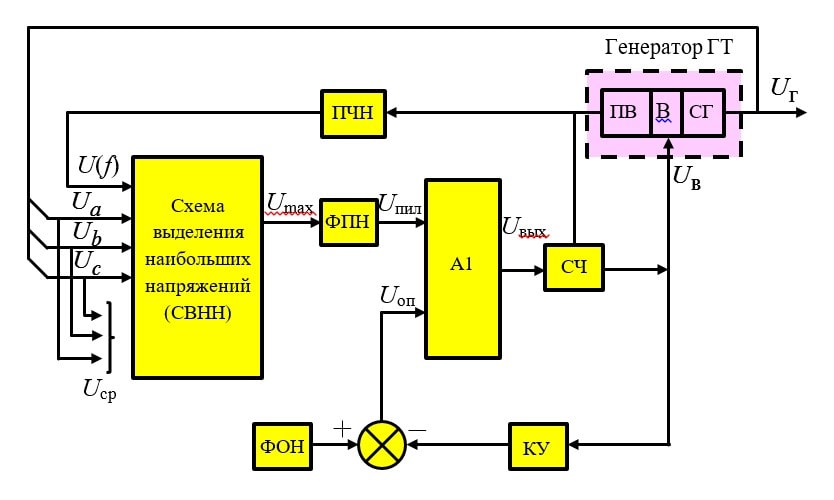
Рисунок 5 – Структурная схема регулятора напряжения РНТ115ВО
Напряжение на обмотку возбуждения возбудителя Uвв генератора типа ГТ подается импульсами постоянной амплитуды, но изменяемой скважности (длительности импульса).
Требуемая точность стабилизации напряжения в данных регуляторах (рисунок 4, 5) обеспечивается соответствующим выбором величины коэффициента усиления регулятора, однако при этом наряду с повышением точности системы регулирования напряжения запас ее устойчивости уменьшается.
Данные регуляторы по быстродействию и точности уже приблизились к тем предельным возможностям, которые могут быть достигнуты при реализации принципа регулирования по отклонению. Дальнейшее повышение качества регулирования требует перехода на новые принципы управления и новые схемные решения [4,5,8]. В связи с этим в последнее время успешно реализуются работы по созданию систем электроснабжения с цифровыми вычислительными устройствами в контуре управления и защиты, позволяющими кардинально решить указанные проблемы повышения качества электрической энергии и проблему надежности этих систем. Так, например, при использовании цифровых методов регулирования напряжения становится возможным реализация оптимальных законов управления генераторами, которые в силу нелинейности и высокой сложности не могут быть реализованы серийными регуляторами напряжения. При этом может быть достигнуто сокращение длительности переходных процессов при коммутации нагрузки и полное устранение перерегулирования напряжения в широком диапазоне изменения режимов работы генераторов.
Для совершенствования данных систем регулирования напряжения предлагается использовать специализированные бортовые цифровые вычислительные машины в системе регулирования напряжения.
На рисунке 6 представлен автоматический регулятор напряжения синхронного генератора с блоком цифровой коррекции [9]. В нашем случае корректор представлен в виде специализированной бортовой цифровой вычислительной машины. Она применяется для целей определения текущего состояния и коррекции напряжения канала генерирования путем воздействия на уставки основного регулятора.
Данная модель по сравнению с серийными регуляторами (рисунок 4, 5) за счет введения специализированной бортовой цифровой вычислительной машины обладает повышенным быстродействием и точностью регулирования напряжения в статических режимах и уменьшением величин приведенных переходных напряжений. Кроме того, данная система обладает повышенной надежностью за счет введения дополнительного (параллельного) канала.
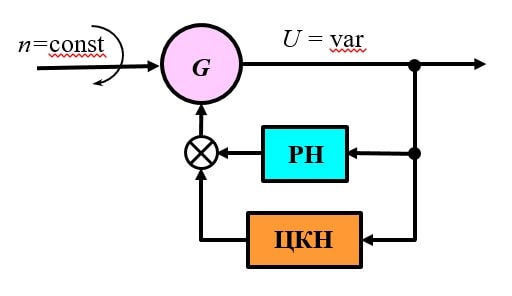
Рисунок 6 − Схема регулирования напряжения при использовании
цифро-аналогового регулятора
Функциональная схема системы регулирования напряжения с цифровым корректором (ЦКН) содержит (рисунок 7):
В данном случае регулирование напряжения генератора ГТ осуществляется по принципу отклонения. Так, любое отклонение напряжения генератора Uт от эталонного Uэт воспринимается ИО, преобразуется в блоках ФСУ, ФИ, УМ в ток (напряжение) возбуждение возбудителя Iвв, величина которого зависит от разности напряжений Uэт и Uг. Благодаря изменению сигнала Iвв напряжение генератора приводится к номинальному значению.
Цифровой корректор напряжения, подключенный параллельно аналоговому регулятору, работает совместно с ним и увеличивает точность регулирования напряжения и тем самым повышает качество напряжения и уменьшает пределы нормальных переходных напряжений в статическом режиме а так же в динамическом режиме, уменьшая колебательный процесс и перерегулирование [9].
Повышается надежность канала генерирования первичной системы электроснабжения, за счет резервирования. В настоящее время, если отказывает аналоговый регулятор, то напряжение перестает регулироваться и качество напряжения падает. В данной модели если откажет аналоговый регулятор, то взять нагрузку на себя сможет цифровой корректор напряжения, если же наоборот откажет корректор, то аналоговый регулятор будет работать в прежнем режиме и качество электроэнергии не станет хуже, чем при существующих серийных регуляторах напряжения.
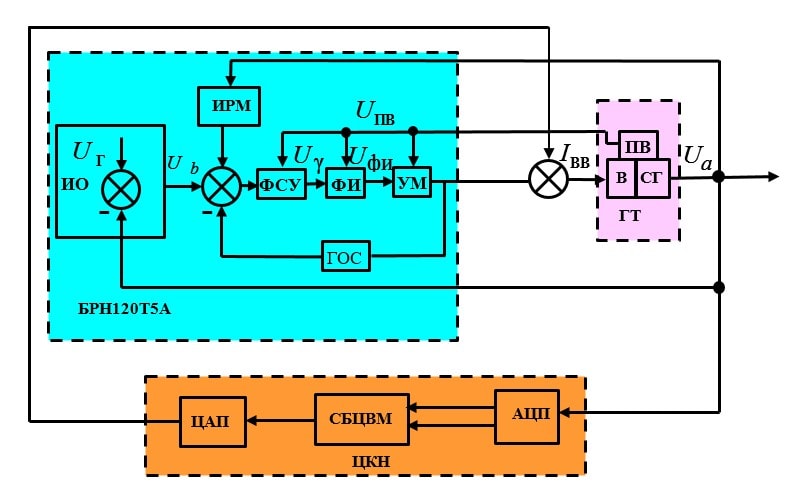
Рисунок 7 − Структурная схема регулирования напряжения при использовании БРН120Т5А совместно с цифровым корректором напряжения
Для оценки эффективности регуляторов напряжения (рисунок 4, 5, 7) были разработаны их математические модели в среде моделирования
Simulink & MatLab [10,11,12].
Виртуальная модель регулятора напряжения БРН120Т5А в среде Simulink & MatLab выглядит следующим образом (рисунок 8).
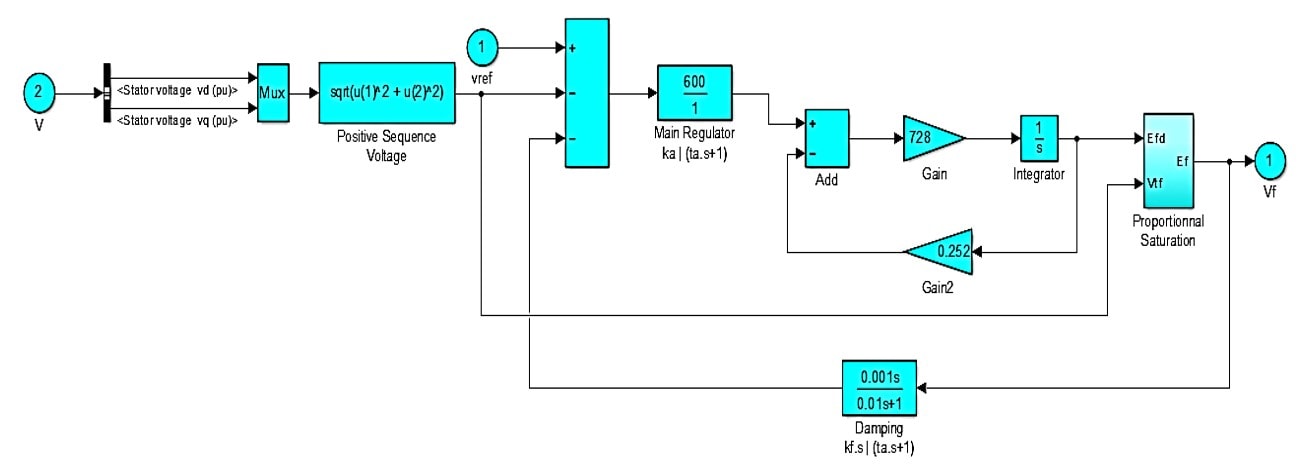
Рисунок 8 – Модель регулятора напряжения БРН-120Т5А
в среде Simulink & MatLab
На вход модели vref подается требуемое напряжение (уставка регулятора напряжения), на вход V подается выходной вектор параметров, содержащий продольную и поперечную составляющие напряжения статора генератора по осям d, q [10,11]. На выходе блока Proportional Saturation получается напряжение возбуждения основного генератора, которое затем подается на выход регулятора Vf и далее на обмотку возбуждения генератора.
Виртуальная модель регулятора напряжения РНТ115ВО в среде Simulink & MatLab представлена на рисунке 9.
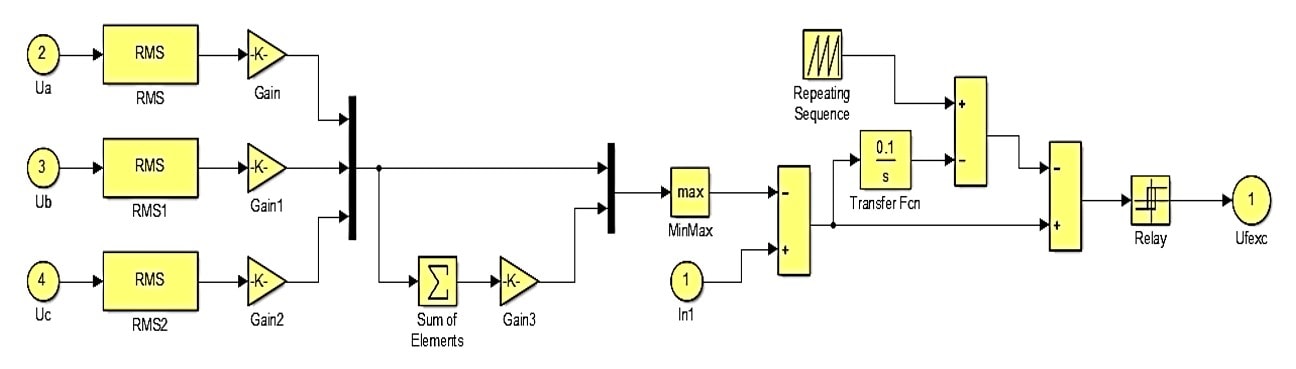
Рисунок 9 – Модель регулятора напряжения РНТ115ВО
в среде Simulink & MatLab
Фазные напряжения Ua, Ub и Uc, снимаемые с точки регулирования, преобразуются блоками RMS и Gain в сигнал постоянного тока, пропорциональный максимальному из фазных напряжений, и в сигнал, пропорциональный среднему напряжению трех фаз (выход блока Gain3). Эти сигналы поступают на схему выделения наибольшего напряжения
(блок MinMax):
После схемы выделения наибольшего напряжения сигнал инвертируется. Отрицательное значение входного сигнала суммируется с положительным опорным сигналом со входа In1. Полученный в результате сигнал ошибки подается на инверсный вход компаратора и на вход интегратора (блок Transfer Fcn). На прямой вход компаратора подается сумма выхода интегратора и сигнала с генератора пилообразного напряжения (блок Repeating Sequence). В результате на выходе компаратора имеем сигнал модулированный по ширине импульса (от ширине импульса зависит напряжение на обмотке возбуждения генератора).
Виртуальная модель цифрового корректора напряжения в среде
Simulink & MatLab представлена на рисунках 10, 11.
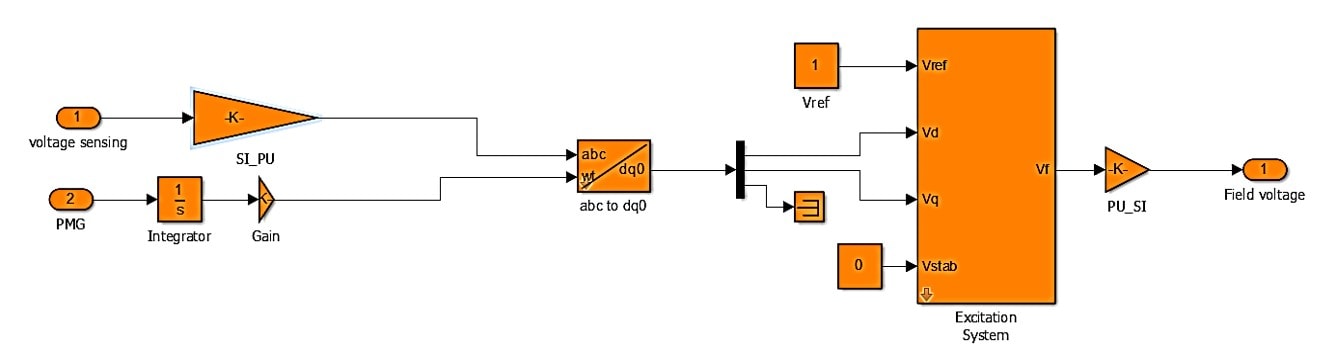
Рисунок 10 – Модель цифрового корректора напряжения
в среде Simulink & MatLab
Блок voltage sensing данной модели подает выходное напряжение генератора в блок SI_PU, где данное напряжение переводится в относительные единицы измерения PU. Блок PMG имитирует частоту вращения вала генератора. Эти сигналы после преобразования в блоках Integrator, abc to dq0, Gain подаются на входы Vd и Vq блока Excitation System (рисунок 11). Кроме этого в данный блок подается еще 2 параметра с блоков Vref (уставка регулятора напряжения) и Vstab (отклонение напряжения от заданного значения). В результате на выходе блока Excitation System имеем сигнал, который подается на обмотку возбуждения генератора.
Более детально описание блоков и методика моделирования регуляторов и генератора в среде Simulink & MatLab приведено в [10,11,12,13].
Проведенное виртуальное моделирование совместной работы регуляторов напряжения и генератора при различных возмущениях в среде Simulink & MatLab позволило определить эффективность данных регуляторов напряжения, а именно пределы допустимых значений ступенчатых характеристик переходную напряжения регуляторов (рисунок 11). Анализ графиков показал, что длительность переходных процессов при реализации системы регулирования напряжения совместно работающих регуляторе БРН-120Т5А и цифровом корректоре напряжения сократится до (10–20)·10-3 с при одновременном уменьшении диапазона изменения напряжения с (88÷155) В (рисунок 4, БРН-120Т5А) до (107÷122) В (рисунок 4, БРН-120Т5А с цифровым корректором напряжения).Таким образом наиболее эффективным регулятором напряжения с точки зрения качества электроэнергии [14,15] является регулятор БРН-120Т5А работающий совместно с цифровым корректором напряжения, схема которого приведена на рисунке 7.
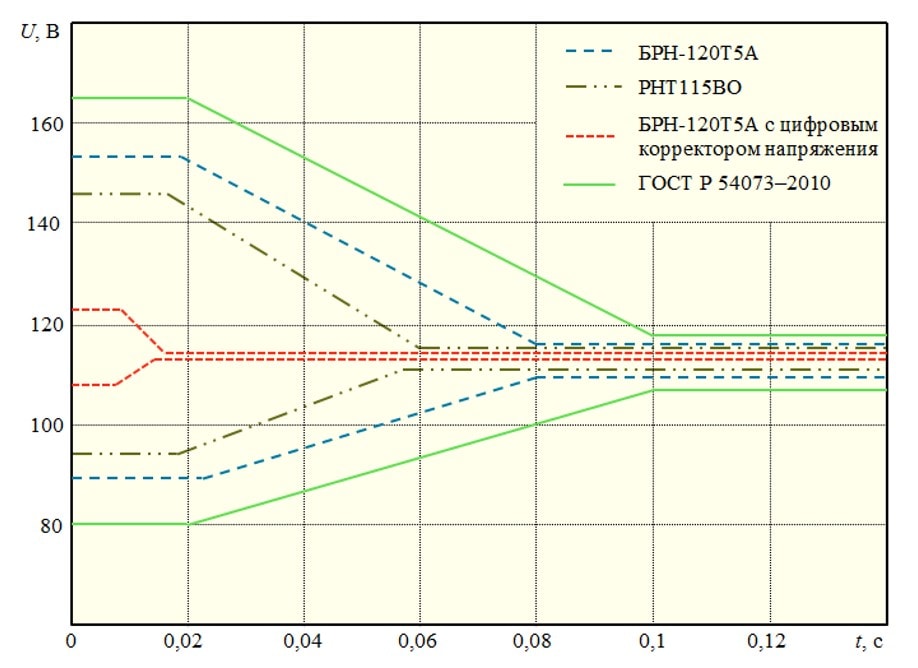
Рисунок 12 – Пределы нормальных переходных напряжений
Результаты проведенных исследований свидетельствуют об эффективности системы регулирования напряжения (рисунок 7) и широких возможностях повышения с ее помощью качества электроэнергии, как того требует концепция All electric aircraft.
Список использованных источников:
1. Интернет-портал компании Aircraft Electrical Power Systems – Charged with Opportunities – www.aerospace.frost.com.
2. Интернет-портал – European Aeronautic Defense and Space Company – www.airbus.com.
3. Adam McLoughlin. More Electric Aircraft Forum. Engine Powerplant Electrical Systems. 2009 MOET Project Consortium – ALL RIGHTS RESERVED. http://www.moetproject.eu.
4. AbdElhafez A.A., Forsyth A. J. A Review of More-Electric Aircraft// 13th International Conference on AEROSPACE SCIENCES & AVIATION TECHNOLOGY, ASAT- 13, May 26 – 28, 2009. – Paper: ASAT-13-EP-01.
5. Воронович С., Каргопольцев В., Кутахов В. «Полностью электрический самолет». Современное состояние и перспективы развития.// Авиапанорама.−2009.−Март-Апрель. –С.14-17.
6. Карнаухов, Н. С. Перспективные направления повышения показателей качества электроэнергии первичных систем электроснабжения воздушных судов: Всероссийская научно-практическая конференция «Академические жуковские чтения». Воронеж, Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина , 2013 – 294c.
7. Капустин, А.Г. Системы электроснабжения летателдьных аппаратов. Часть II: Регуляторы напряжения авиационных генераторов. – Минск: МВВИУ, 1994. – 120 с.
8. Капустин, А.Г. Анализ свойств системы электроснабжения с цифровой системой управления: 4-я Военно-научная конференция курсантов и молодых ученых «Совершенствование обеспечения полетов авиации», 28-29 ноября 2013: сборник статей. – Минск: МГВАК, 2013. – 342с.
9. Карнаухов, Н.С. Решение о выдаче патента по заявке № u 20140432 на полезную модель «Система автоматического регулирования напряжения генератора переменного тока» от 24.03.2015 № u 20140432, РБ.
10. Карнаухов, Н. С. Применение пакета Simulink & MatLab для исследования переходных процессов в автономной системе генерирования переменного тока / Н. С. Карнаухов // 3-я Международная научно-техническая конференция «Актуальные вопросы науки и техники в сфере развития авиации», 16-17 мая 2013 года: тезисы докладов. – Минск: ВА РБ, 2013. – 254 с.
11. Карнаухов, Н. С. Исследование переходных процессов в автономной системе генерирования при действии конечных сигналов по цепям управления и нагрузки / Н. С. Карнаухов // V Международная молодежная научная конференция «Гражданская авиация: XXI век», 11 – 12 апреля 2013 года: сборник материалов. − Ульяновск: УВАУГА(И), 2013. – 244 с.
12. Капустин, А .Г. Цифровое управление перспективными автономными системами электроснабжения: 5-я Военно-научная конференция курсантов и молодых ученых «Совершенствование обеспечения полетов авиации», 18 декабря 2014: Тезисы докладов.−Минск: МГВАК, 2014.−184с.
13. Капустин, А .Г. Применение ЦВМ в перспективных автономных системах электроснабжения: 5-я Военно-научная конференция курсантов и молодых ученых «Совершенствование обеспечения полетов авиации», 18 декабря 2014: Тезисы докладов.−Минск: МГВАК, 2014.−184с.
14. ГОСТ Р 54073 – 2010. Системы электроснабжения самолетов и вертолетов. Общие требования и нормы качества электроэнергии М., Стандартинформ, 2011. – 33 с.
15. Карнаухов, Н. С., Капустин, А. Г. Цифровой алгоритм полной компенсации возмущений в статическом режиме работы автономной системы электроснабжения: 4-я Военно-научная конференция курсантов и молодых ученых «Совершенствование обеспечения полетов авиации». Минск, МГВАК (военный факультет), 2013г. Минск, МГВАК, 2013г. – 212с.