О НЕТРАДИЦИОННОМ УСТРОЙСТВЕ АВТОМОБИЛЕЙ И ДРУГИХ МЕХАНИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ
Назад в рубрику 
Г.В.Труханович, инженер, г.Давид-Городок
Рассматривается существующая структурная схема колесных транспортных средств, отмечаются некоторые ее недостатки, предлагается альтернативная конструктивная схема, основанная на технических возможностях принципиального изобретения. Обосновывается практическая применимость автономного движителя, способного, при отсутствии системы рулевого управления, осуществлять маневрирование и работать в режиме автопилота и в беспилотном варианте. Рассматриваются возможные преимущества предлагаемой конструкции.
ВВЕДЕНИЕ
Все механизмы, агрегаты и системы, входящие в автомобиль, традиционно делятся на три основные части: двигатель, шасси и кузов [1]. Двигатели внутреннего сгорания, как источники механической энергии, постоянно совершенствуются, внедряются прогрессивные конструкторские и технологические решения для повышения экономичности, надежности и ресурса, но, тем не менее, к.п.д. их ограничен физической сущностью. Ведется работа по применению новых источников механической энергии, в том числе гибридных установок, электродвигателей, роторных, двигателей Стирлинга и других перспективных конструкций, осуществляются мероприятия по решению возникающих проблем.
В кузове непосредственно размещаются груз и люди, в грузовом автомобиле имеется грузовая платформа для груза и кабина для водителя и пассажиров, а в легковом автомобиле кузов выполняет, кроме того, роль рамы в несущей системе. Для повышения эксплуатационных характеристик, комфортности и снижения веса внедряются новые материалы, улучшаются эргономические характеристики и применяются различные системы жизнеобеспечения.
Шасси состоит из трансмиссии, несущей системы, органов управления и предназначено для передачи усилия от двигателя к ведущим колесам, а также для управления и передвижения автомобиля. Трансмиссия передает крутящий момент от двигателя ведущим колесам и состоит из муфты сцепления, коробки передач, дифференциалов и полуосей. Кроме того, у заднеприводных автомобилей имеется карданная передача и ведущий мост, а у переднеприводных ̶ внутренние и наружные ШРУСы. К органам управления относятся рулевое управление и тормозная система. Наличие большого количества механизмов и устройств в составе шасси, в том числе сложных, дает основание ставить задачу по их оптимизации в количественном и качественном отношении с целью улучшения экономических, технологических и эксплуатационных показателей автомобилей и других механических транспортных средств [2]. Концептуальная схема и вариант принципиального конструкторского решения и рассматриваются в данной работе.
1. МОТОДВИЖИТЕЛЬ
В классическом исполнении трансмиссии сцепление и коробка передач монтируются в едином силовом блоке, закрепленном на двигателе. Этот блок трансформирует и передает крутящий момент одного из окончаний коленчатого вала, который затем дифференциалом распределяется между двумя ведущими колесами одной оси. Такая схема обеспечивает синхронность оборотов ведущих колес при прямолинейном движении автомобиля и разность оборотов при движении в поворотах. Рулевое управление обеспечивает поворот колес (обычно передних) на требуемый угол, вследствие чего увеличивается сопротивление движению в определенном направлении, а автомобиль стремится занять положение наименьшего сопротивления движению и, соответственно, изменяет направление.
Решение поставленной задачи по оптимизации шасси основано на изобретении принципиально нового фрикционного вариатора с необходимыми характеристиками. Концептуальная схема предлагаемого шасси (назовем его мотодвижитель) представлена на рис.1.
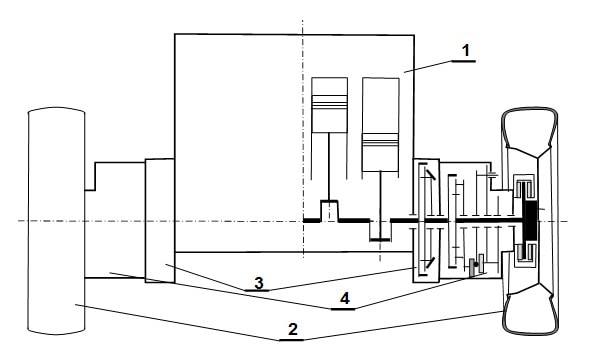
Рис.1 Схема мотодвижителя
1-двигатель, 2-колеса, 3-реверсивные блоки, 4-вариаторные блоки.
Предлагаемая конструкция представляет собой единое устройство, включающее тормозную систему и все системы, необходимые для работы двигателя. Емкость для горючего может располагаться дистанционно. Об управлении будет сказано ниже. Выбор типа двигателя 1 не имеет принципиального значения. Необходимые изменения в двигателях внутреннего сгорания касаются привода распределительного вала и отбора мощности для генератора и других систем, что не представляет особо сложной конструкторской задачи. Колеса 2 могут быть выполнены также в виде ведущих катков в гусеничном исполнении мотодвижителя. Реверсивные блоки 3, имеющие отдельное для каждого управление, обеспечивают три режима: “прямое вращение”,” выключено” и “обратное вращение”. Вариаторные блоки 4, имеющие отдельное для каждого управление, обеспечивают плавное изменение частоты вращения колес от нуля до значения, близкого к частоте вращения вала двигателя. Все это позволяет мотодвижителю совершать прямолинейное движение (частота вращения обоих колес одинакова), повороты в процессе движения (разная частота вращения колес) и уникальную возможность маневрирования (вращение колес в противоположных направлениях и с разной частотой).
Ниже рассматриваются основополагающие конструкторские решения.
1.1 РЕВЕРСИВНЫЙ БЛОК
Основой реверсивного блока является планетарная передача, имеющая свойство при последовательной остановке ее основных звеньев получать различные варианты передачи [3]. Режимы работы реверсивного блока показаны на рис.2. Вал эпицикла 1 жестко соединен с валом двигателя, а вал солнечной шестерни 3 жестко соединен с входным валом вариаторного блока. На водиле 2 радиально с сателлитами 4 закреплены поворотные рычаги 5 с пружинами 6. Устройство управления условно показано в виде рычага 7, имеющего возможность воздействовать на поворотный рычаг 5, в реальной конструкции оно может быть выполнено в виде кольца и штоков с роликами с тем, чтобы синхронно воздействовать на рычаги 5 при любом угловом положении водила и его вращении. Управление может быть как ручным, так и с помощью исполнительных механизмов: электромагнитов, пневмо и гидроприводов, сенсорных эл. двигателей и т.д.
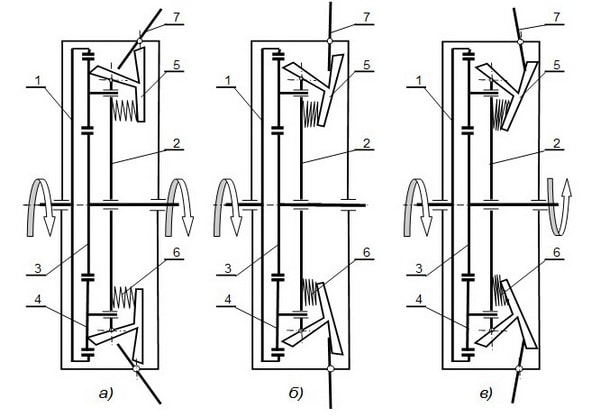
Рис.2 Схема реверсирования
а-прямая передача, б-выключено, в-обратное вращение.
В режиме прямой передачи рычагами 5 под воздействием пружин 6 блокируются сателлиты 4, и вся система вращается как единое целое. При повороте рычагов 5 с помощью управляющего устройства 7 сателлиты 6 освобождаются и водило 2 имеет возможность свободно вращаться при наличии нагрузки на валу солнечной шестерни 3, или вращаться вместе с этой шестерней при отсутствии нагрузки – передачи крутящего момента нет. Дальнейшим поворотом рычагов 5 достигается затормаживание водила 2 и солнечная шестерня вращается в обратном направлении с угловой скоростью, пропорциональной отношению числа зубьев солнечной шестерни и эпицикла. Достоинством такой схемы является то, что при реверсировании зубчатые зацепления не переключаются, а недостатком является необходимость балансирования устройства. Шестерня эпицикла 1 может выполнять роль маховика в двигателях внутреннего сгорания и служить для отбора мощности для систем двигателя.
1.2 ВАРИАТОРНЫЙ БЛОК
Наиболее эффективное использование тепловой энергии сгорания топлива при переводе ее в механическую происходит при эксплуатации двигателя в оптимальном режиме на всех стадиях движения, что в трансмиссиях обеспечивают вариаторы, из которых наиболее высокий КПД имеют вариаторы, выполненные по планетарной схеме [4]. Кинематическая схема одного из вариантов вариаторного блока изображена на рис.3. Основой является планетарный замкнутый дифференциал, роль замыкающего звена в котором выполняет дискошариковый вариатор [5]. Входной вал эпицикла 15 с внутренним зубчатым венцом жестко соединен с валом солнечной шестерни реверсивного блока, водило 5 выполнено в виде шестерни с наружным зубчатым венцом, которая входит в зацепление с шестерней 4, жестко закрепленной на валу ведущего диска 1 дискошарикового вариатора. На валу ведомого диска 2 дискошарикового вариатора установлено нажимное шариковое устройство 19 и жестко закреплена шестерня 6, входящая в зацепление с шестерней 7, в свою очередь, жестко закрепленной на одном валу с солнечной шестерней 8 планетарной передачи, который непосредственно соединен с колесом. Таким образом, крутящий момент вала эпицикла может передаваться сателлитами 16 непосредственно солнечной шестерне 8 и, соответственно, колесу, а по другому направлению крутящий момент эпицикла подвижным водилом 5 и шестерней 4 может передаваться дискошариковому вариатору и от него шестернями 6 и 7, опять же, колесу, т.е. дифференциал замыкается.
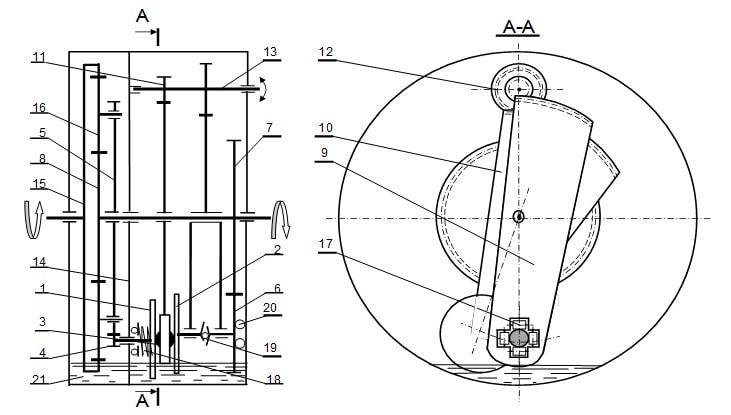
Рис.3 Кинематическая схема вариаторного блока
1-ведущий диск, 2-ведомый диск, 3-шарик, 4-шестерня ведущего диска, 5-водило, 6-шестерня ведомого диска, 7-шестерня выходного вала, 8-солнечная шестерня, 9-маятник шарика, 10-маятник ведомого диска, 11-управляющая шестерня маятника шарика, 12-управляющая шестерня маятника ведомого диска, 13-вал управляющих шестерен, 14-внутренняя стенка корпуса, 15-эпицикл, 16-сателлиты, 17-обойма шарика, 18-пружина начального нажатия, 19-нажимное устройство, 20-упорный подшипник, 21-смазочное масло.
Предусматривается, что диаметр зубчатого венца водила 5 в несколько раз больше диаметра шестерни 4, чем достигается уменьшение передаваемого ведущему диску 1 дискошарикового вариатора крутящего момента в несколько раз, поэтому это направление используется для регулирования и новизна предлагаемого конструктивного решения состоит в принципе этого регулирования.
Дискошариковый вариатор по классификации [6] является вариатором с промежуточным элементом, регулирование в котором производится изменением диаметров обоих колес, и относится к шаровым вариаторам. Суть изобретения состоит в том, что промежуточный элемент (шарик) не имеет и ориентированной и физической осей вращения в отличие от известных конструкций [6], а изменение диаметров колес происходит за счет смещения одного из них по дуге окружности, имеющей общий центр с дугой окружности смещения шарика. В рассматриваемой конструкции (рис.3) крутящий момент от ведущего диска 1 шариком 3 передается ведомому диску 2 за счет силы нажатия, создаваемой пружиной начального нажатия 18 и нажимным устройством 19, которое создает силу нажатия в зависимости от крутящего момента на валу ведомого диска. Обойма 17 шарика 3 может быть выполнена в виде ограничивающих роликов для уменьшения силы трения и закреплена в маятнике шарика 9, выполненном соосно с валом центрального колеса 8, а ось вращения ведомого диска 2 и шестерни 6 закреплена в маятнике диска 10, также выполненном соосно с валом центрального колеса 8. Оба маятника имеют зубчатые сегменты, находящиеся в зацеплении с управляющими шестернями 11 и 12, жестко закрепленными на валу 13, поворотом которого и осуществляется регулирование. Зубчатые зацепления рассчитываются таким образом, чтобы угловая скорость поворота маятника диска была в два раза больше угловой скорости поворота маятника шарика, что обеспечивает синхронное перемещение диска и шарика без скольжения. Подшипник оси ведущего диска 1 крепится на внутренней стенке корпуса 14. Необходимо предусмотреть возможность некоторого осевого перемещения дисков и шарика. Принципиальная схема регулирования дискошарикового вариатора представлена на рис.4.
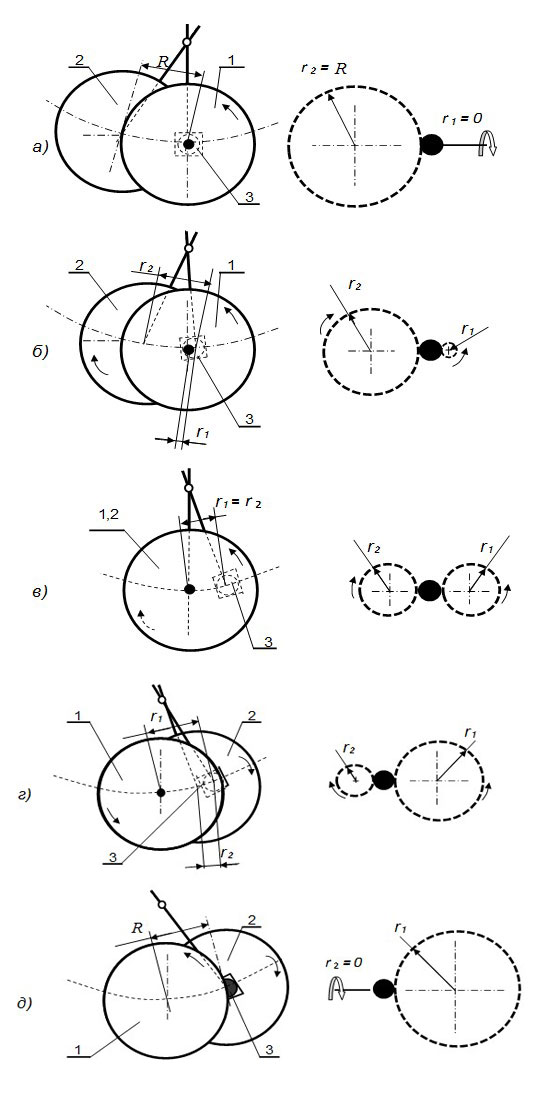
Рис.4 Схема регулирования с развертками
а-крутящий момент не передается, б-режим редуктора, в-прямая передача, г-режим мультипликатора, д-крутящий момент не передается.
Поворот управляющего вала можно производить как в ручном режиме, так и с помощью исполнительного механизма. В процессе регулирования шарик совершает сложновращательное движение, состоящее из вращения в тангенциальном направлении относительно дисков и передающего крутящий момент, и вращения в радиальном направлении, изменяющего передаточное отношение вариатора.
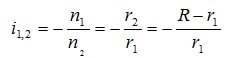
Очевидно, что в каждый момент времени симметричного регулирования обеспечивается равенство:
![]() (1.2.1)
(1.2.1)
где:
r1 — радиус ведущего диска, определяется точкой касания с шариком,
r2— радиус ведомого диска, определяется точкой касания с шариком,
R — рабочий радиус дисков.
Передаточное отношение дисковой пары с промежуточным шариком определяется по аналогии с зубчатыми и фрикционными парами [6] и не зависит от диаметра шарика — паразита:
 (1.2.2)
(1.2.2)
По классификации [3] кинематическая схема представленного вариаторного блока относится к группе 2К-Н, где ведущим колесом является эпицикл, а ведомым – солнечная шестерня. Связь между угловыми скоростями этих звеньев n_(15 ) и n_8 определена в [7] и выражается зависимостью:
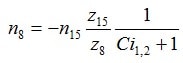 (1.2.3)
(1.2.3)
где:
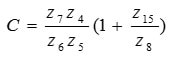 и является постоянной величиной, определяемой конструкцией конкретного вариатора исходя из его назначения и преимущественной работы в определенном диапазоне,
и является постоянной величиной, определяемой конструкцией конкретного вариатора исходя из его назначения и преимущественной работы в определенном диапазоне,
Z с индексом – число зубьев соответствующей шестерни (рис.3).
Анализируя уравнение (1.2.3) видим, что при бесконечном передаточном отношении дискошариковой пары i1,2 (r1 = 0) и постоянной угловой скорости входного вала передачи угловая скорость выходного вала равна нулю, что соответствует режиму холостого хода, когда весь крутящий момент воспринимает водило. Когда передаточное отношение дискошариковой пары равно нулю (r1 = R) то:
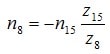 ,
,
водило заторможено, а планетарная передача становится простой [3], знак минус указывает на противоположное направление вращения. Несложный расчет показывает, что при оборотах двигателя и, соответственно, эпицикла n15 = 1000 щб/мин и диаметре ведущих колес 0,6м, скорость автомобиля при прямой передаче может составить примерно 130км/час, дальнейшее увеличение скорости можно производить за счет увеличения оборотов двигателя, но преимущественный режим движения предполагается при использовании широкого диапазона регулирования дискошарикового вариатора. Так как на каждом скоростном режиме крутящий момент двигателя внутреннего сгорания можно изменять от ноля до максимального значения [8], в любой момент времени можно найти наиболее оптимальное соотношение оборотов двигателя, его крутящего момента и передаточного отношения вариаторного блока с тем, чтобы обеспечить минимальный путевой расход топлива. Это особенно актуально при городской езде, когда расход топлива можно уменьшить в несколько раз [4] и, при этом, значительно улучшить экологические показатели автомобиля.
Для практического применения вариаторного блока не менее важными являются и его силовые характеристики. Если основной силовой поток передается зубчатыми зацеплениями и его величина обеспечивается стандартными конструкторскими решениями, то вспомогательный, хотя он и в несколько раз меньше основного, передается фрикционным вариатором, силовые возможности которого ограничены. Максимальная мощность, передаваемая одной контактной парой составляет 1 / 2 кВт (шаровые вариаторы конструкции ЭНИМС и типа Корр [6] передают мощность 3 / 15 кВт), при этом необходимо предусмотреть запас сцепления k = 1.25 / 1.5 для работы без скольжения. Таким образом, рассмотренный выше мотодвижитель может найти применение в автомобилях малого класса, мотоколясках, трициклах и т.п. С целью увеличения передаваемой вариаторным блоком мощности предлагается применить принцип многоконтактности в многопоточной симметричной схеме. Схема вариаторного блока, выполненного в виде бесступенчатой торцовой дискошариковой передачи [9] показана на рис.5.
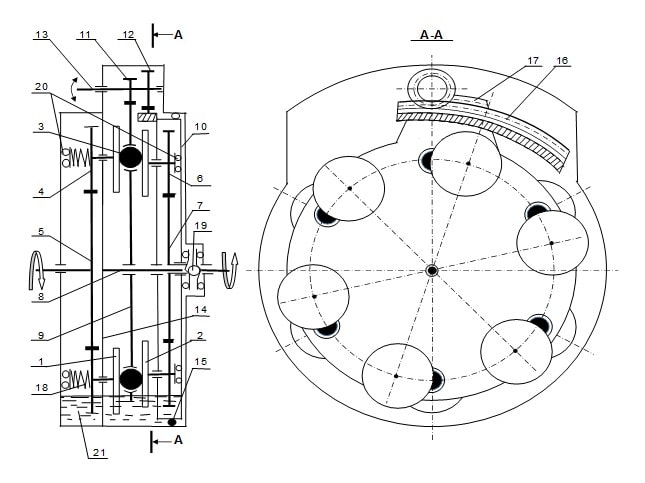
Рис.5 Кинематическая схема торцовой дискошариковой передачи
1-ведущий диск, 2-ведомый диск, 3-шарик, 4-шестерня ведущего диска, 5-входная центральная шестерня, 6-шестерня ведомого диска, 7-центральная шестерня выходного вала, 8-центральный вал, 9-сепараторный диск, 10-подвижный корпус, 11-управляющая шестерня сепараторного диска, 12-управляющая шестерня подвижного корпуса, 13-вал управляющих шестерен, 14-внутренняя стенка корпуса, 15-уплотнение, 16-зубчатый сектор подвижного корпуса, 17-зубчатый сектор сепараторного диска, 18-пружина начального нажатия, 19-нажимное устройство, 20-упорный подшипник, 21-смазочное масло.
Входная центральная шестерня 5, вал которой жестко соединен с валом солнечной шестерни реверсивного блока, передает крутящий момент через шестерни 4 ведущим дискам 1 передачи (в данном примере их шесть), тем самым разделяя силовой поток и, соответственно, мощность, передаваемая одной дискошариковой парой, кратно уменьшается. После трансформации ведомые диски 2 через шестерни 6 передают крутящий момент выходной центральной шестерне 7, тем самым объединяя силовой поток. Подшипники валов ведущих дисков и шестерен закреплены в средней стенке корпуса 14, подшипники валов ведомых дисков и шестерен и центральной шестерни 7 закреплены в подвижном корпусе 10, имеющем возможность поворачиваться на центральном валу 8. На этом же валу имеет возможность поворачиваться и сепараторный диск 9 шариков 3, свободно в нем вращающихся и передающих крутящий момент от ведущих дисков ведомым. Таким образом, подвижный корпус 10 и сепараторный диск 9 выполняют роль маятников диска и шарика по аналогии с вышеприведенным дискошариковым вариатором и имеют зубчатые сектора 16 и 17, которые входят в зацепление с шестернями 12 и 11, жестко закрепленными на управляющем валу 13, поворотом которого и осуществляется регулирование оборотов выходного вала передачи. Подвижный корпус 10 имеет возможность некоторого перемещения также и в осевом направлении по шарикам 15 с помощью условно показанного нажимного устройства 19. Начальное усилие нажатия осуществляется пружинами 18, а подвижные вращающиеся элементы передачи в осевом направлении имеют упорные подшипники 20. Торцовая дискошариковая передача имеет такую же схему регулирования (рис.4) и практическое ограничение по передаваемой мощности, но может найти применение в качестве вариоколеса [10]. В ниже рассматриваемой кинематической схеме вариаторного блока рис.6 такая передача уже служит регулятором в замкнутом дифференциале, что позволяет значительно увеличить возможную передаваемую мощность вариаторного блока и применить его в тяжелых механических транспортных средствах.
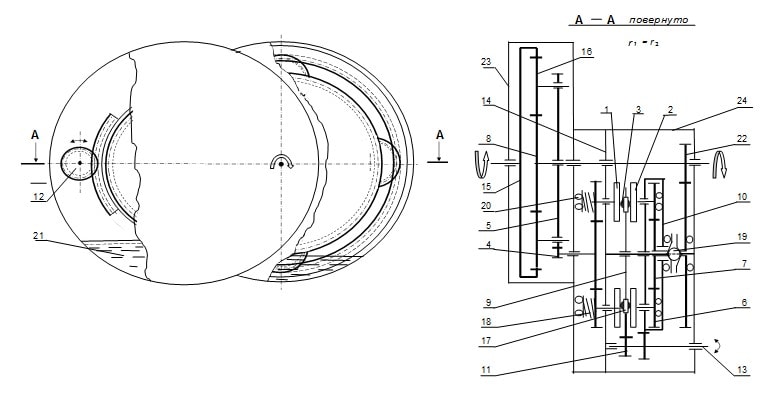
Рис.6 Кинематическая схема усиленного вариаторного блока
1-ведущий диск, 2-ведомый диск, 3-шарик, 4-шестерня ведущего диска, 5-водило, 6-шестерня ведомого диска, 7-сдвоенная шестерня ведомого вала вариатора, 8-солнечная шестерня, 9-маятник шариков, 10-маятник ведомых дисков, 11-управляющая шестерня маятника шариков, 12-управляющая шестерня маятника ведомых дисков, 13-вал управляющих шестерен, 14-внутренняя стенка корпуса, 15-эпицикл, 16-сателлиты, 17-обойма шарика, 18-пружина начального нажатия, 19-нажимное устройство, 20-упорный подшипник, 21-смазочное масло, 22- шестерня выходного вала, 23-корпус планетарной передачи, 24-корпус регулятора.
Очевидна аналогия кинематики этой схемы со схемой на рис.4, отличием является то, что регулируемый силовой поток разделяется на определенное число уменьшенных по мощности параллельных потоков, которые синхронно трансформируются и затем соединяются в один, что позволяет кратно его увеличивать по отношению к возможному по мощности силовому потоку, передаваемому одной фрикционной парой.
Определить теоретически с высокой точностью максимальную мощность, передаваемую такой конструкцией не представляется возможным, так как необходимо учитывать целый ряд факторов: характеристики применяемых конструкционных и смазочных материалов, чистоту и точность обработки контактирующих деталей, их размеры, КПД, ресурс, поправочные коэффициенты, определяемые опытным путем, взаимовлияние параллельных элементов и т.д. Исходя из имеющихся технических характеристик существующих конструкций и проведенных экспериментальных исследований [6] и, учитывая, что вырабатываемая двигателем мощность сразу делится на два потока, можно предположить, что мотодвижители мощностью до 150 ÷200 кВт вполне могут быть реализованы конструктивно и технологически с необходимыми для практического применения техническими характеристиками, но объективный вывод может быть сделан только после проведения ОКР.
Таким образом, выше показана возможность практического создания самостоятельной движущейся конструкции на двух параллельных колесах, имеющей возможность не только изменять скорость движения, но и маневрировать. Предполагается, что управление режимом двигателя, реверсом, вариатором и тормозами осуществляется исполнительными механизмами по командам бортового компьютера, получающего и обрабатывающего информацию от оператора и датчиков обратной связи. Это позволяет оператору работать дистанционно проводным или беспроводным методом, а компьютерная программа при наличии видеокамер и дополнительных датчиков может осуществлять управление в режиме автопилота или беспилотном режиме
2. АВТОМОБИЛЬ И ДРУГИЕ МЕХАНИЧЕСКИЕ ТРАНСПОРТНЫЕ СРЕДСТВА
Выделение мотодвижителя в качестве независимого агрегата позволяет кардинально изменить устройство механических транспортных средств, так как отсутствие рулевого управления, трансмиссии и подвески оставляет за классическим шасси только роль несущей системы. Для транспортных средств особо малого, малого и среднего класса целесообразной, вероятно, будет рамная конструкция, как показано на рис.7.
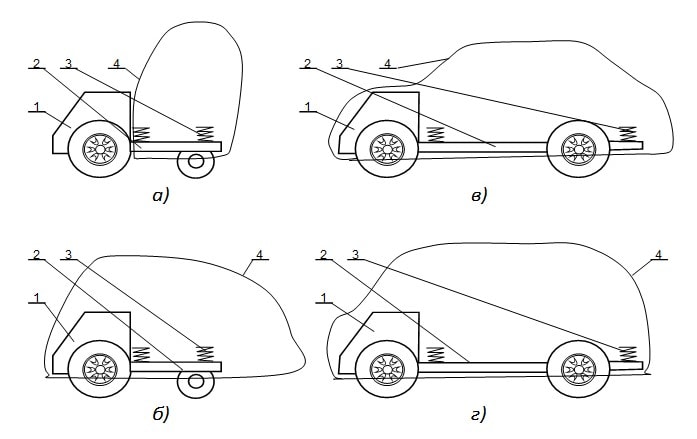
Рис.7 Схемы рамных конструкций
а-2-х местный трицикл с поворотным задним колесом, б-3-х местный трицикл с поворотным задним колесом, в-4-х местный автомобиль с задним мостом, г-6-ти местный автомобиль с задним мостом.1 – мотодвижитель, 2 – рама, 3 – амортизаторы кузова, 4 – кузов.
В приведенных схемах возможно, в том числе, и ручное управление мотодвижителем с помощью рычагов и тросов, а также использование дополнительных колес для торможения. Следует отметить маневренность транспортных среств а) и б), что немаловажно в стесненных городских условиях. Жесткость амортизаторов кузова можно регулировать в зависимости от нагрузки, а сам кузов выполнить в облегченном варианте, так как функционально он предназначен только для размещения пассажиров и небольшого груза.
Для тяжелых и грузовых транспортных средств, вероятно, лучше использовать мотодвижитель в качестве сменного тягача с целью оптимального использования и тягачей, и прицепных конструкций. Примерные схемы таких конструкций показаны на рис.8.
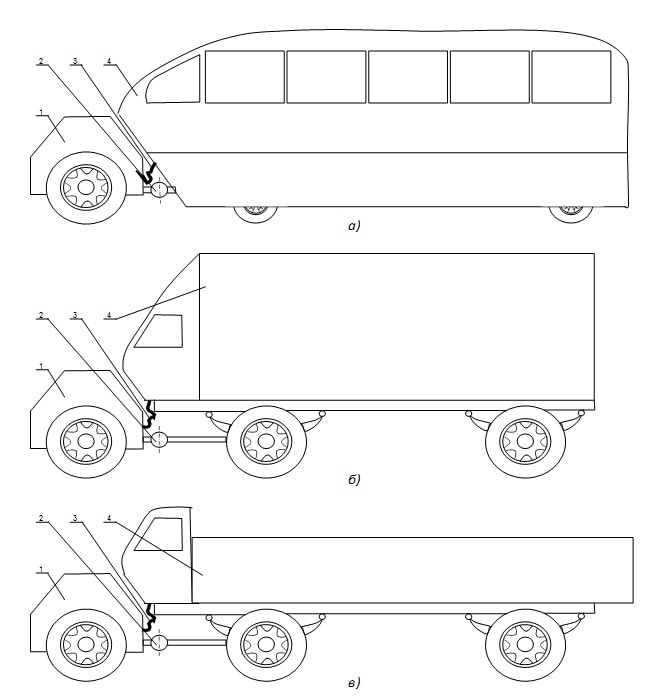
Рис.8 Схемы прицепных конструкций
а-автобус, б-фургон, в-грузовик.1 – мотодвижитель, 2 – сцепное устройство, 3 – гибкие соединители, 4 – прицепная конструкция, включающая рабочее место оператора.
В таком варианте можно предусмотреть в мотодвижителе дополнительные выдвижные упорные колеса для движения в процессе сцепки и замены. Гибкими соединителями осуществляется подача электрического напряжения, связь пульта управления с бортовым компьютером и, при необходимости, соединение пневматических, гидравлических и топливных систем. Сцепное устройство может быть выполнено как жестким, так и поворотным. Пульт управления может быть выполнен в виде традиционного руля, кнопок и рычагов, в виде штурвала, в виде джойстика и т.п.
Исключительная маневренность мотодвижителя и возможность дистанционного управления им может быть использована в некоторых рабочих машинах (погрузчики, мототележки, планировщики площадок и т.п.), а также в военной технике.
Таким образом, автомобиль и другие механические транспортные средства предлагается условно разделить на две составляющие: движущую часть (мотодвижитель) и двигаемую часть (кузов, фургон, грузовая платформа, рабочий агрегат и т.п.), т.е. вернуться к схеме “лошадь”- “телега”.
3. ВЫВОДЫ
Предлагаемая конструктивная схема основана на возможном применении изобретений “Дискошариковый вариатор” [5] и “Бесступенчатая торцовая дискошариковая передача” [9], которые не исследовались экспериментально и не имеют точных технических характеристик, поэтому определить однозначно диапазон применения такой конструкции в силовом и скоростном плане не представляется возможным. В данной работе рассматривается теоретический вариант. Тем не менее, можно отметить ее преимущества по сравнению с существующими конструкциями:
1.Упрощается конструкция, трансмиссия и двигатель объединяются в автономный блок с расположенными на одной оси колесами, вариаторными блоками, реверсивными блоками и коленчатым валом двигателя, что позволяет исключить из конструкции сложную систему рулевого управления и механизмы передачи крутящего момента к дистанционно расположенным колесам. Снижение материалоемкости и трудоемкости позволяет значительно удешевить стоимость транспортного средства.
2.Применение вариаторного регулирования оборотов и мощности двигателя позволяет значительно уменьшить расход топлива двигателей внутреннего сгорания и улучшить экологические показатели транспортного средства.
3.Разделение движущих и двигаемых частей транспортных средств позволяет повысить комфортность пассажиров и операторов.
4.Управление движением транспортного средства с помощью компьютера и исполнительных механизмов без переключения зубчатых зацеплений позволяет работать дистанционно, в том числе, в режимах беспилотника и автопилота.
5.Использование раздельных движущих и двигаемых частей транспортных средств позволяет осуществлять более эффективную их эксплуатацию.
6.Использование компьютерных технологий управления позволяет уменьшить влияние человеческого фактора и повысить безопасность.
7.Исключительная маневренность мотодвижителей расширяет область их применения, как в рабочих машинах, так и в военной технике.
ЛИТЕРАТУРА
1.Пузанков А.Г. Автомобили: Устройство автотранспортных средств. Учебник для студ. Учреждений сред. проф. образования /Алексей Григорьевич Пузанков. –М.: Издательский центр “Академия”, 2004. -560с.
2.ПДД Республики Беларусь. Указ Президента Республики Беларусь 28.11.2005. №551
3.Планетарные передачи. Справочник. Кудрявцев В.Н. [и др.]. Л., “Машиностроение” (Ленингр. отд-ние), 1977. 536с. с ил.
4.Н.Гулиа, И.Бессуднов. Супервариатор – перспективная бесступенчатая коробка передач для автомобилей, НиТ. Текущие публикации, 13.10.2004г. Электронная версия.
5.Дискошариковый вариатор: пат. №15512 Респ. Беларусь: МПК F 16H 15/08 (2006) /Г.В.Труханович; дата публ. 28.02.2012.
6.Пронин Б.А. Бесступенчатые клиноременные и фрикционные передачи (вариаторы) / Б.А.Пронин, Г.А.Ревков. –Изд, 3-е, перераб. и доп. – М.: Машиностроение, 1980. -320с., ил.
7. Труханович Г.В. О реализации теоретического диапазона регулирования дискошарикового вариатора / Г.В.Труханович. Вестник Казанского технического университета / КГТУ – Казань, 2015, вып. 6.
8.Двигатели внутреннего сгорания: Устройство и работа поршневых и комбинированных двигателей: Учебник для студентов вузов. Алексеев В.П. [и др.]. – 4-е изд.,перераб. и доп, -М.: Машиностроение, 1990. -288с.: ил.
9.Бесступенчатая торцовая дискошариковая передача: пат. №17703 Респ. Беларусь: МПК F 16H 15/08 (2013) /Г.В.Труханович: дата публ. 30.12.2013
10.Труханович Г.В. Универсальная бесступеньчатая передача /Г.В.Труханович. Международный научно-технический журнал “Изобретатель” /№5-6 — Минск, 2010. – с.22-27.