Моделирование технологических процессов в ходе разработки и отладки автоматических систем управления технологическими процессами
Назад в рубрикуМоделирование технологических процессов в ходе разработки и отладки АСУ ТП
Введение
Для повышения качества регулирования основных технологических параметров требуется применение новых, более совершенных и перспективных подходов и методов по разработке и настройке САР. Эти новые подходы должны отвечать требованиям универсальности, а также быть достаточно простыми по принципам организации и функционирования для эффективного внедрения в различные сферы промышленности. На сегодняшний день ни одна из создаваемых или модернизируемых автоматических систем управления технологическими процессами (АСУТП) не представляется без использования современных копьютерных технологий и программного обеспечения. Использование новых разработок позволяет увеличивать производительность, повышать качество конечной продукции, снизить временные затраты и свести к минимуму возможные поломки оборудования в ходе пусконаладочных работ при вводе оборудования в эксплуатацию. В данной работе будет описан один из методов моделирования технологических процессов в ходе разработки и отладки АСУТП, целью которого является повышения уровня качества и точности работы САР .
Методика отладки АСУ при использовании математического моделирования
В процессе разработки новой АСУТП основной задачей является правильный выборСАР и последущий расчет и анализ её характеристик. Так уже на этапе разработки структуры системы автоматического регулирования разработчики сталкиваются с преблемой выбора управляющих алгоритмов.Ключом к успешному решению данной проблемы является наличие исчерпывающей информации об объекте управления необходимой для создания его математической модели. Наличие математической модели ОУ позволит разработчику более точно подходить к написанию управляющих алгоримовиопределению параметров регуляторов входящих в состав САР. Однако, применение математической модели объекта управления, позволяющее проводить подобные рассчеты, подводит нас к следующей проблеме — проблеме реализации математической модели в средах разработки АСУТП. Причиной тому является тот факт, что реализация математической модели не всегда представляется возможным в системах разработки программ АСУ для программируемых логических контроллеров (ПЛК) из-за ограничений в математическом аппарате, также в этом случае существенно возрастают временные затраты на проектирование. Перенос программы управления в среду разработанную для мат. моделированя (например MatlabSimulink) так же не является корректным, так как выполнение алгоритма программы в ПЛК и персональном компьютере (ПК) будут отличаться.
Решением подобной задачи является создание связи объединяющей две независимо работающие среды: среду отладки управляющей логики ПЛК и среды моделирования с созданной математической моделью ОУ. Так, например, в последних версиях программного обеспечения компании MathSoft (Matlabv7.0 и выше) появился ряд новых компонентов заметно упрощающих предложенную процедуру. Данные приложения позволяют получать доступ к данным контроллера в режиме реального времени, как для их чтения, так и с возможностью записи в память контроллера. Стоит отметить что данный процеес справедлив так же и для случая когда вместо реального ПЛК используется его симуляция в среде разработки. Процесс обмена данными между программируемым логическим контроллером (ПЛК) и персональным компьютером (ПК) осуществляется при помощи технологии ОРС. OPC (OLE для управления процессом) представляет собой универсальный программный интерфейс, который может использоваться на устройствах, поставляемых различными производителями. В качестве промышленного стандарта OPC описывает обмен данными для различных приложений в условиях промышленного производства. Работая на своем ПК, пользователь может наблюдать, вызывать и обрабатывать данные и события, происходящие в системах автоматизации. OPC-интерфейс является частью программного обеспечения, работающего на ПК, и является платформой для систем операторского управления и визуализации или других приложений.OPC-интерфейс базируется на модели «клиент/сервер».Один компонент предоставляет свои сервисы другому компоненту через интерфейсы. Другой компонент использует эти сервисы. Схематично связь между ПЛК и приложением Matlab на ПК можно изобразить на рисунке 1.
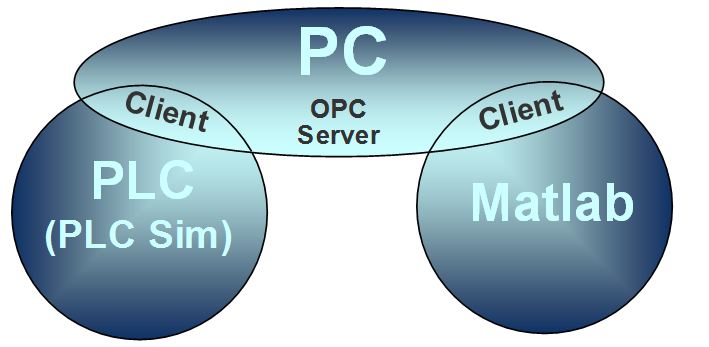
Рис. 1 Схема связи Matlab и ПЛК при помощи ОРС
Рассмотрим более подробно процесс совместной работы ПЛК (или же его симуляции) и математической модели вMatlab. Структура передачи и обработки информации между персональным компьютером и контроллером изображена на рисунке 2.
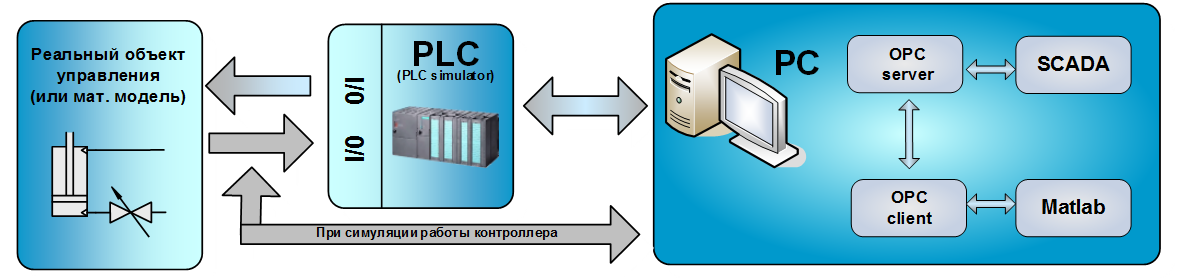
Рис. 2 Структурная схема передачи и обработки информации между персональным компьютером и контроллером
Цикл выполнения данного алгоритма можно разделить на следующие этапы:
1. Опрос и запись в область памяти ПЛК входных данных (состояния объекта управления в данный момент времени – всевозможные датчики, сигналы задания и т.д.). В нашем случае происходит передача данных от среды мат. моделирования в область памяти ПЛК по технологии OPC.
2. Обработка полученных входных данных согласно управляющих алгоритмов в ПЛК.
3. Формирование управляющих воздействий на объект управления (воздействия на управляющие механизмы – задвижки, клапаны и т.д.). В нашем же случае происходит передача данных от ПЛК назад в систему математического регулирования по тому же принципу что и на первом этапе цикла.
4. Реакция объекта управления на произведенные АСУ управляющие воздействия. В нашем случае происходит расчет математической модели объекта управления в системе моделирования с последующим сохранением данных о новом состоянии объекта.
Так как алгоритм является циклическим по окончании 4 этапа мы снова переходим на первый этап цикла и процедура повторяется заново. Далее при помощиMatlabOPCtoolboxостается лишь произвести объеинение нашей математичской модели ОУ и управляющей логики контроллера. Далее выставляем требуемое время продолжительности выполнения симуляции и производим моделирование с фиксированным шагом 0.1 секунда, так как процесс обновления данных ОРС сервера составляет 100мс. Процесс выполнения моделирования происходит в режиме реального времени, поэтому пользователь может наблюдать за всеми происходящими процессами и производить управляющие воздействиякак внутри математической модели так и в самой логике контроллера, что является несомненным плюсом данного метода.
Полученный в результате данных преобразований алгоритм работы системы в точности совпадает с режимом работы реальной АСУ и как уже ранее было отмечено цикл выполняется в режиме реального времени, а продолжительность всей процедуры может задаваться пользователем в зависимости от вида процесса регулирования и от быстродействия системы моделирования.
Наладка системы охлаждения технологического газа компрессорной установки
В качестве примера приведу методику наладки системы охлаждения воздушным потокомсмазочного масла из маслосистемы и сжатого воздуха на выходе компрессора. АСУ выполнена на базе ПЛК SiemensSimatic 400H (Step7), система охлаждения – градирня с вентиляторами охлаждения с переменной скоростью вращения (частотный преобразователь). Задача: настройка регулятора температуры сжатого воздуха и смазочного масла, а также параметров управления частотным преобразователем с целью определения оптимальных параметров температурного регулирования и уменьшения электропотребления.
На основе технических данных теплообменника и вентеляторов охлаждения была разработана упрощенная математическая модель системы охлаждения компрессора в приложении MatlabSimulink. Для создания модели привода вентиляторов была взята за основу математическая модель частотно-регулируемого эдектропривода с ипользованием данных установленного двигателя и привода фирмы Siemens(рис. 3).

Рисунок 3. Математическая модель теплообменника и привода вентилятора

Рисунок 4. Система математического моделирования MatlabSimulink в режиме реального времени
В процессе пусконаладочных работ на объекте была зафиксирована значительная колебательность в процессе регулирования температуры при использовании заводских предустановленных параметров (рис. 3).

Рисунок 5. График работы теплообменника (заводские предустановки параметров)
На основе экспериментальных данных были произведены корректировоки в математической модели.Далее была произведена отладка полученной системы по предлагаемой методике, в результате которой были подобраны наиболее удовлетворяющие процессу параметры ПИД-регулятора температуры и задатчика интенсивности для электропривода. В конечном итоге колебательность была устранена и регулирование температуры газа и масла стало отвечать заданным требованиям (рис. 6).
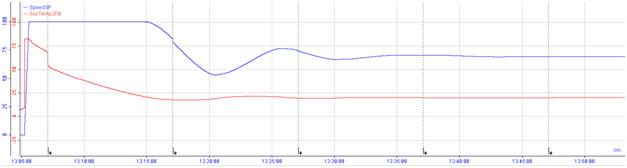
Рисунок 6. График работы теплообменника (после использования методики отладки АСУ при использовании математического моделирования)
Заключение
Полученные результаты позволяют говорить о применимости подобной методики настройки и тестирования программно-технического комплекса различной степени сложности, а использование технологии OPC позволяет применять данную методику для большого количества производителей оборудования АСУ. Также данная методика может быть рекомендована для инженерных расчетов и моделирования процессов управления с целью повышения качества управления технологическими процессами и снижения затрат времени и человеческих ресурсов на разработку и наладку АСУ.
Литература
1. Новиков С.И. Оптимизация автоматических систем регулирования теплоэнергетического оборудования, Часть 1,Учебное пособие// Новосибирский государственный технический университет -2006.С. 3-5
2. Патрахин В.А., Особенности реализации алгоритмов регулирования. [Электронный ресурс]/ Пикад. 3-4/2003. — Режим доступа: http://www.picad.com.ua/pdf/26_30.pdf. Дата доступа 12.12.2013
Автор:
А.С. БРАКОРЕНКО
Учреждение образования «Гомельский Государственный Технический Университет им. П.О. Сухого»
Республика Беларусь